14 lip Mecanum vozilo
Tehnička škola Bjelovar
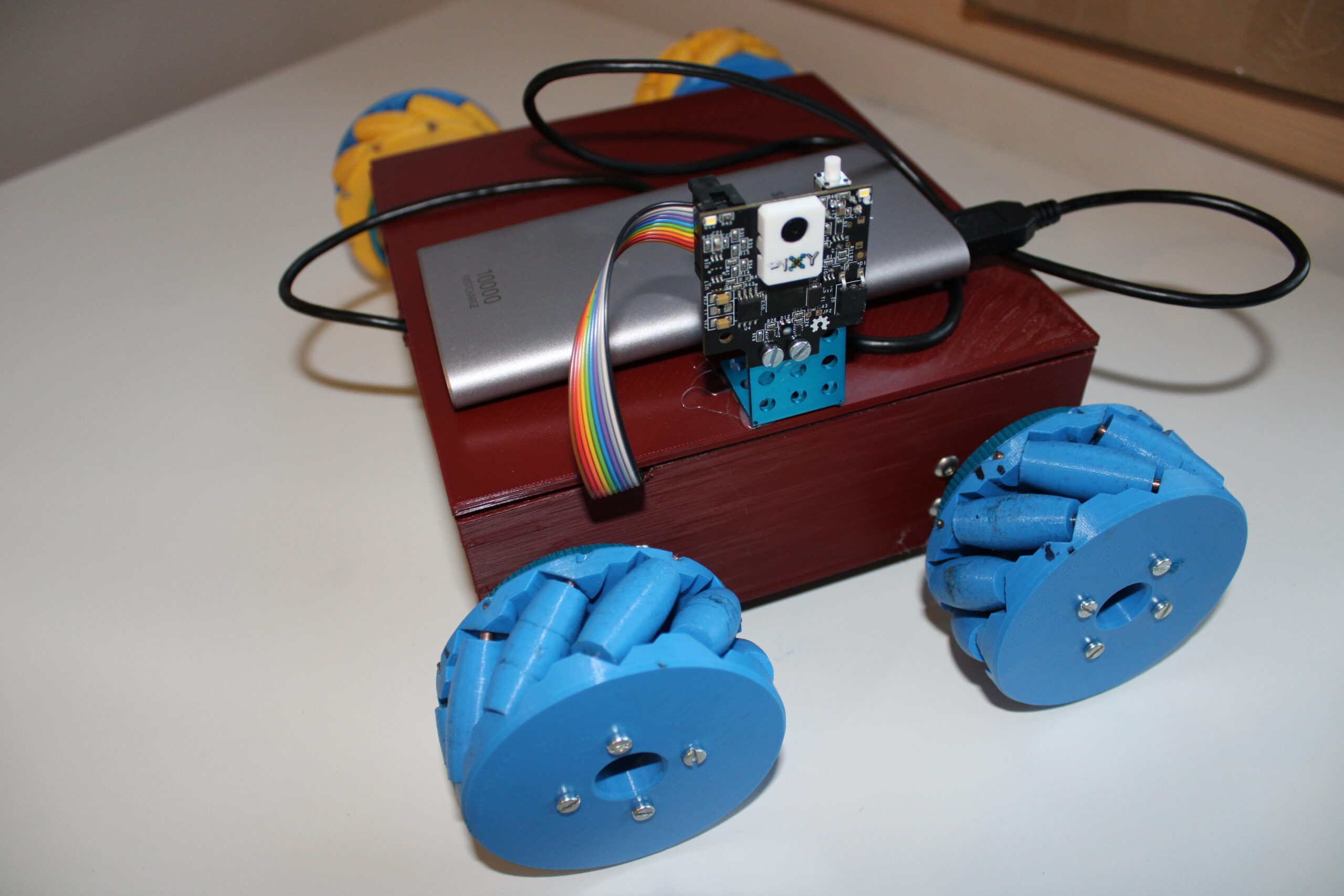
Osnovna ideja projekta bila je izraditi autonomno vozilo s mecanum kotačima upravljano Arduino MKR1000 mikro upravljačem.
Mecanum kotači su kotači koji kombinacijom smjera okretanja kotača i orijentacijom valjčića na kotaču omogućavaju kretanje vozila u svim smjerovima bez klasičnog skretanja. Za potrebe ovog projekta nismo korstili gotove kotače nego smo za njih sami printali dijelove i sastavljali ih. Izazov je bio pronaći podlogu na kojoj će kotači najbolje funkcionirati. Vozilo pokreću 4 DC motora, po jedan za svaki kotač.
Autonomnost vozila postiže se na način da vozilom nakon starta ne upravlja korisnik nego vozilo kontroliramo nizom linijskih kodova koje vozilo očitava pomoću Pixy2 kamere.
Sučelje za korisnika (prikaz emotikona i poruka) i dio funkcionalnosti (javni kalkulator API i slanje email poruke) realizirani su pomoću Blynk sustava.
U demo prikazu mogućnosti vozila vozilo „glumi“ učenika koji u godini pandemije svoje domaće radove prima i na njih odgovara emailom i porukama. Nakon što primi obavijest o prelasku na online nastavu učenik prima (na način da vozilo redom čita linijske kodove koje nalazi na putu) zadatak, nakon toga ga rješava (na način da se pozove javni kalkulator API), šalje rezultat emailom i nakon toga se ode poigrati (demonstracija mogućnosti kretanja vozila).
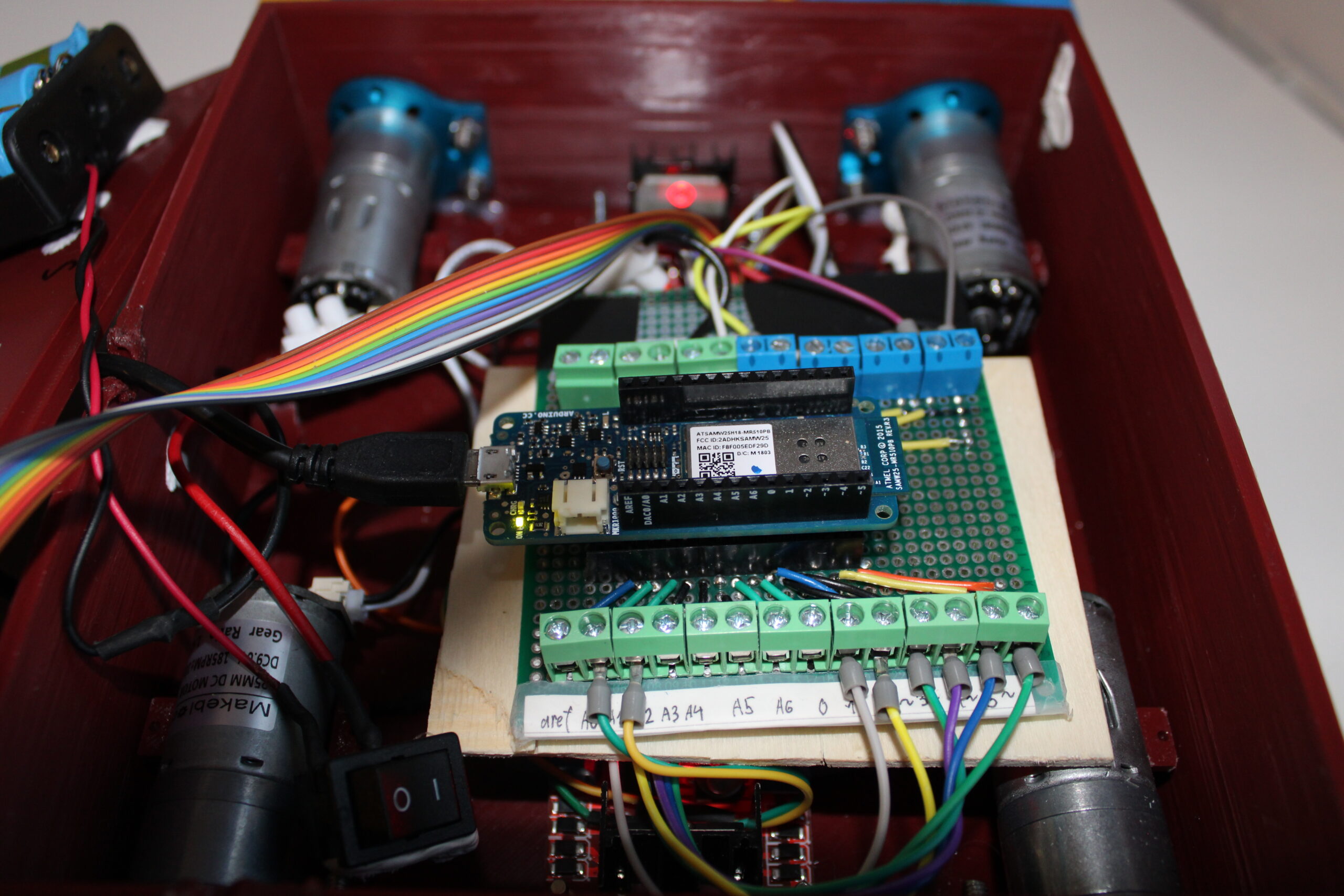
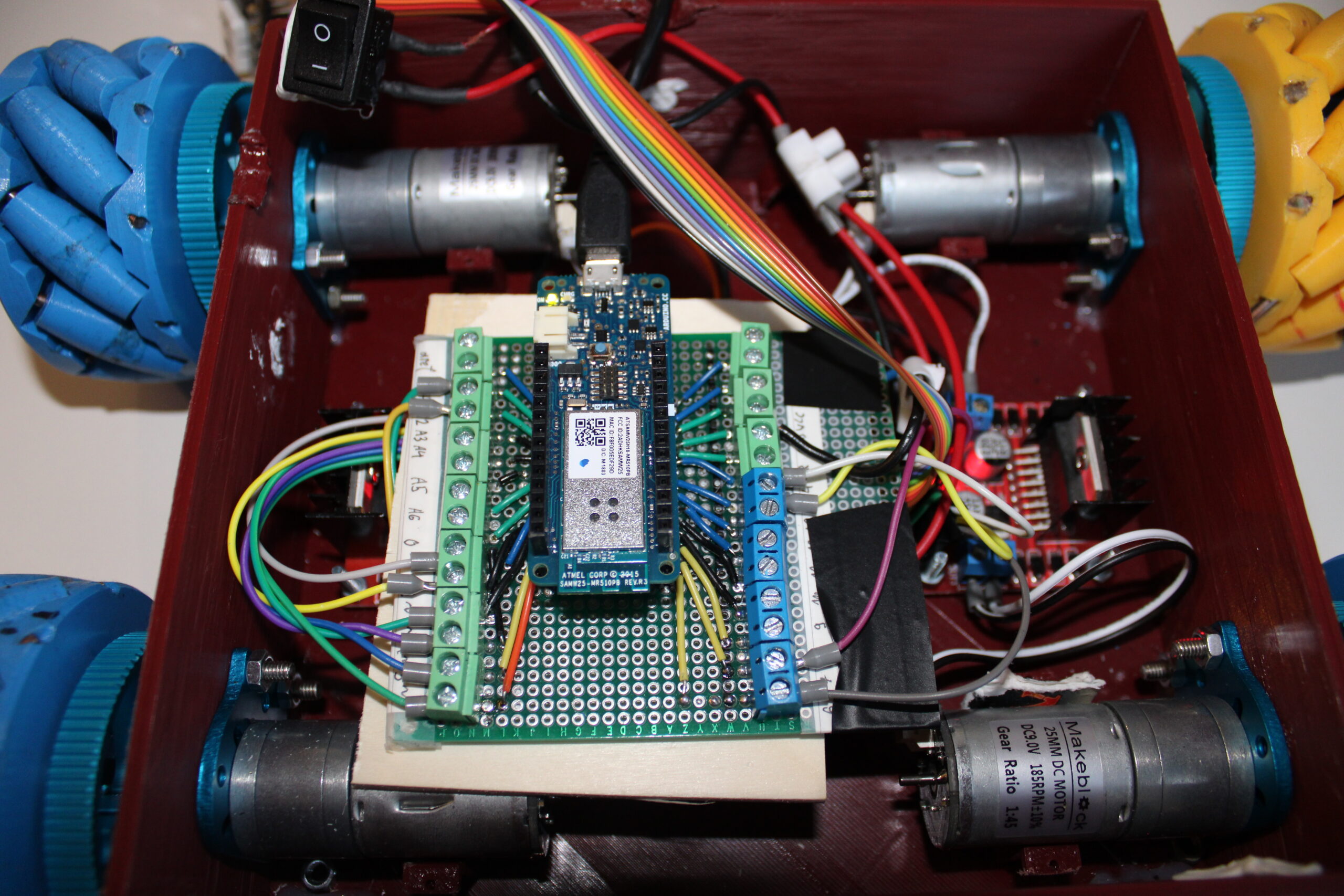
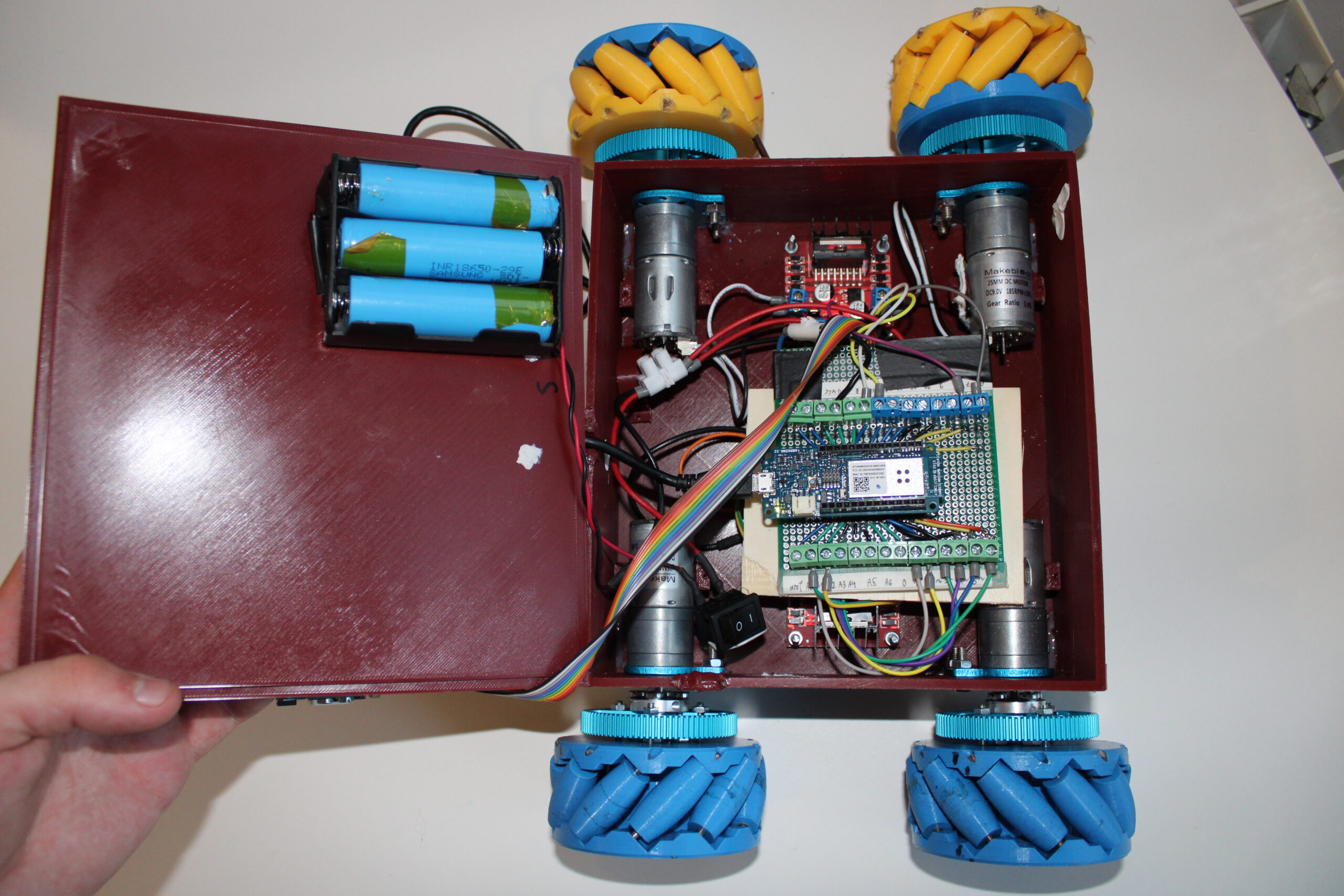
Hardware vozila čine:
-mikro upravljač Arduino MKR1000 sa eksperimentalnom pločicom,
-upravljači motora L298N,
-4 DC motora,
-Pixy2 kamera,
-baterije i
-Android mobilni telefon

Mentor:
Ljudevit Sakal
Učenici:
Petar Bajsić i Petar Klinac