
16 srp Upoznajte micro:Maqueen Lite robot
Dobro došli na uvodni online tečaj o micro:Maqueen Lite robotu.
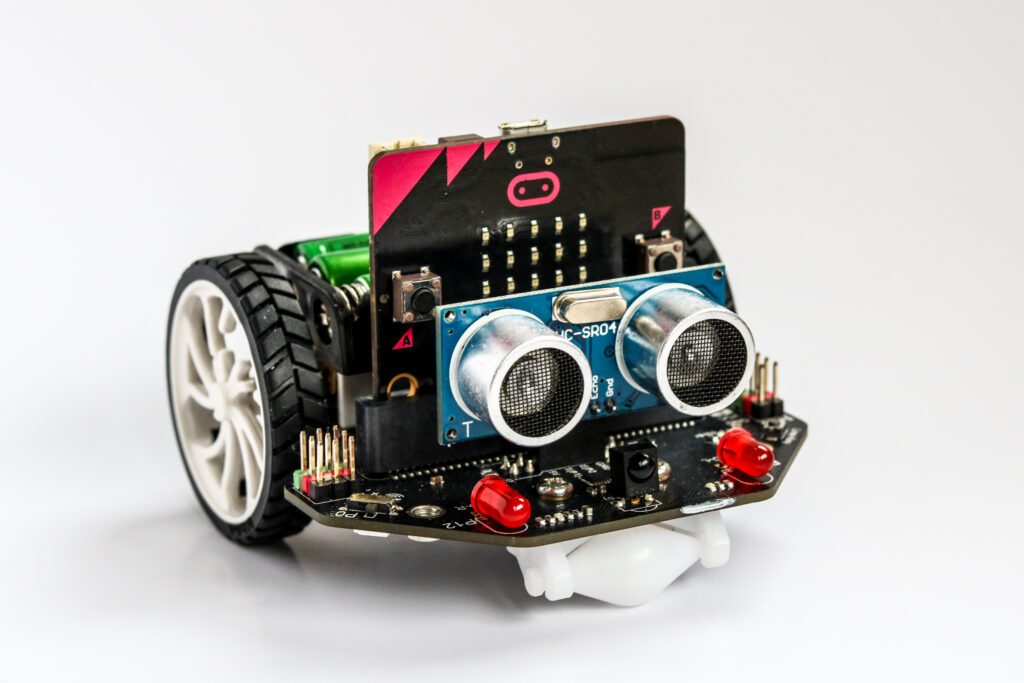
Micro:Maqueen Lite je mobilni robot upravljan micro:bitom koji sadrži ultrazvučni senzor, senzor za praćenje linije, zujalicu, svjetleće diode te priključke za dodatne komponente.
U ovom tečaju proučit ćete dijelove robota, dodati potrebne naredbe za programiranje robota i izraditi nekoliko jednostavnih programa. U tim primjerima uključit ćete prednje svjetleće diode na robotu i pokrenuti ga da vozi.
Uz znatiželju i motivaciju za učenjem, od opreme su vam potrebni: micro:Maqueen Lite robot, micro:bit, USB kabel, računalo i pristup Internetu.
Ako se dosad niste susreli s micro:bitom predlažemo da najprije upišete i završite tečaj Upoznajte micro:bit te se zatim vratite na ovaj tečaj.
Ovdje pogledajte popis knjižnica u kojima možete pronaći potrebnu opremu.