27 kol Servomotore
Il servomotore è il modulo di uscita del set di BOSON. Insieme ad esso si trovano 4 levette con le viti fissarle al motore. Per un corretto funzionamento, dopo il trasferimento del programma su micro:bit, è necessario cambiare l’alimentazione dal micro:bit alla scheda.
Sul servomotore potete fissare una delle levette dal set per vedere meglio la rotazione del motore. Esso ruota la levetta nell’intervallo da 0 a 180 gradi.
Compito
Per conoscere il servomotore create un programma semplice in cui il motore deve ruotare di 150 gradi dalla posizione iniziale. Mettete che la posizione iniziale sia di 20 gradi e quella finale di 170 gradi. Rotazione deve avvenire ogni volta che venga premuto il pulsante. Quando il pulsante si rilascia il motore deve tornare alla posizione iniziale.
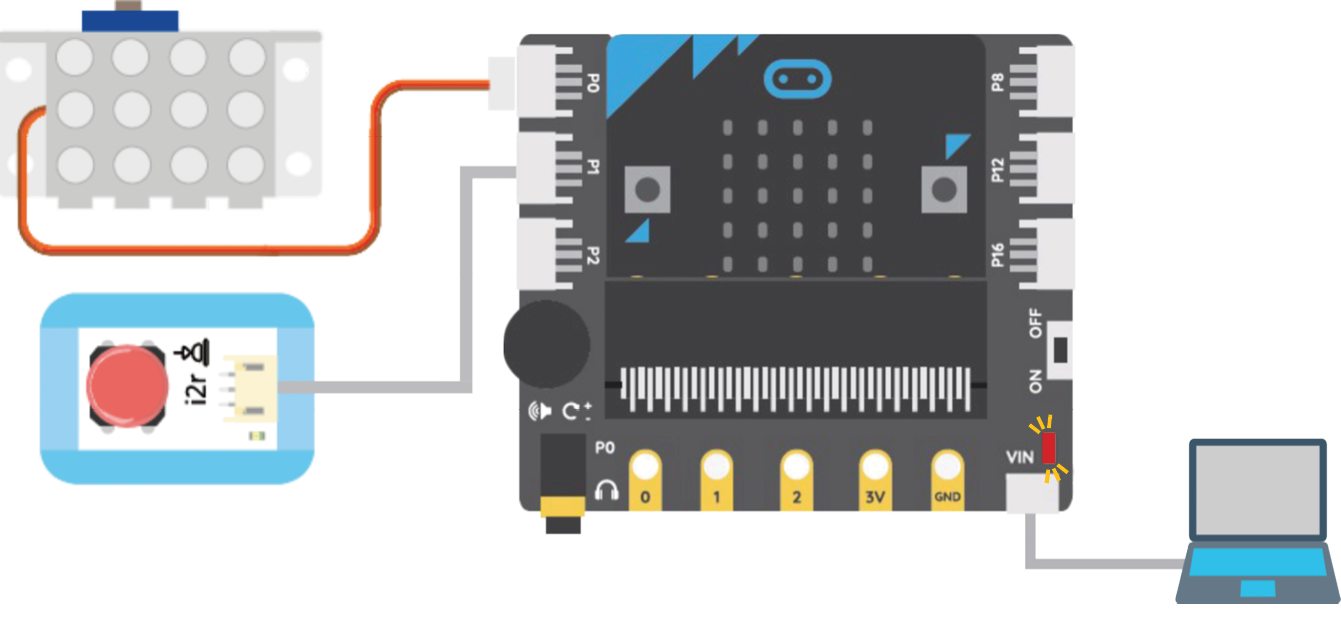
Collegamento di moduli
Inserite il micro:bit nella scheda. Nei posti per collegamento dei moduli elettronici collegate con i cavi il pulsante e il servomotore come mostrato dallo schema di circuito. Il servomotore e il pulsante possono essere collegati a qualsiasi pin. Fate attenzione di segnare i pin nel codice sorgente allo stesso modo come nel circuito. In questo esempio il motore è collegato al pin P0 e il pulsante al pin P1. Dopo il trasferimento del programma su micro:bit trasferite l’alimentazione dal micro:bit al connettore per alimentazione della scheda per il corretto funzionamento del servomotore.
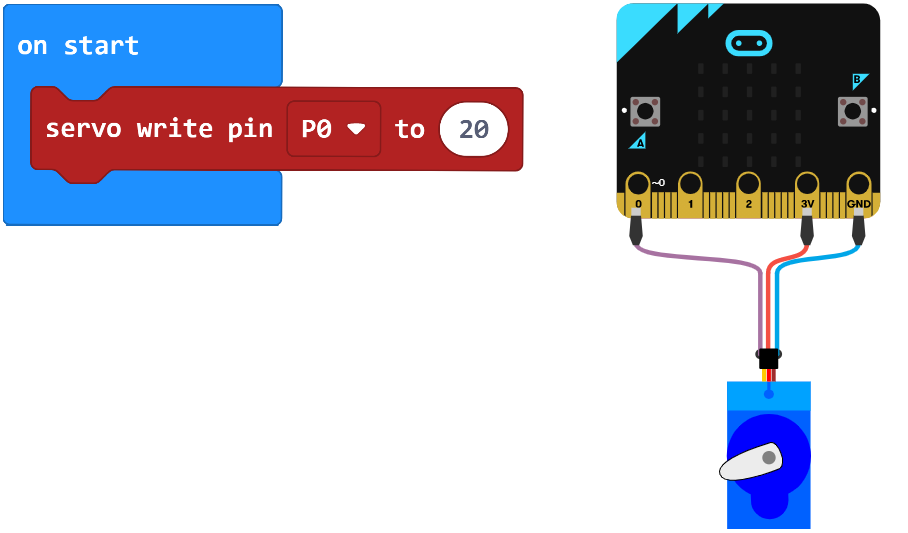
Passo 1
Collocate l’istruzione servo write pin P0 to 20 nel blocco on start per impostare il servomotore nella posizione desiderata all’inizio del programma. Notate che il servomotore è apparso anche sul simulatore attraverso il quale potete provare il vostro programma.
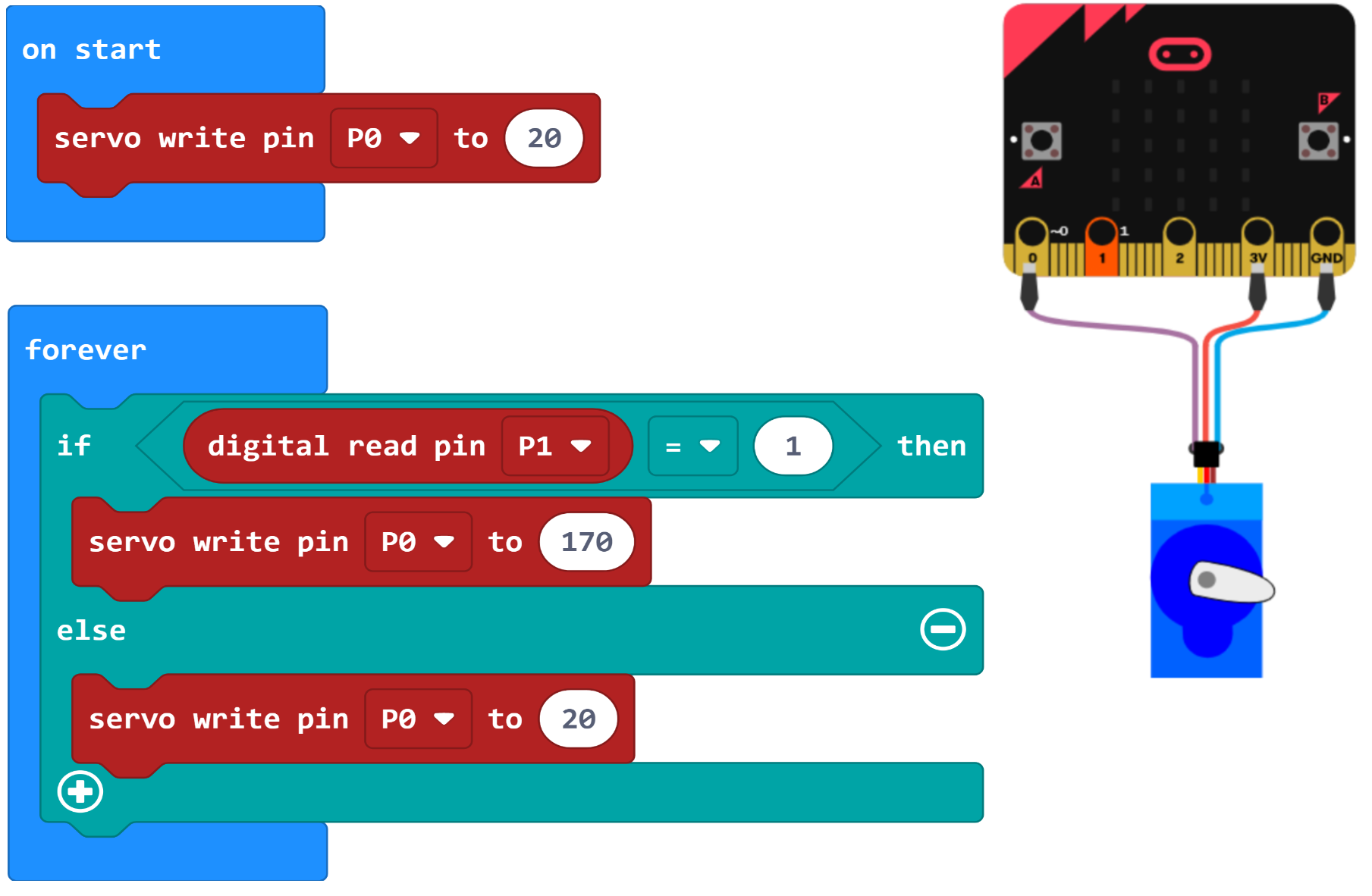
Passo 2
Aggiungete nel ciclo forever l’istruzione if then else. Essa verifica se il pulsante è premuto. Se premuto (if digital read pin P1 = 1), allora il servomotore deve ruotare di 150 gradi (servo write pin P0 to 170). Altrimenti, se il pulsante non è premuto il servomotore deve tornare alla posizione iniziale (servo write pin P0 to 20).