
22 svi Robo vrtlar
Krapinski informatički klub KRIK
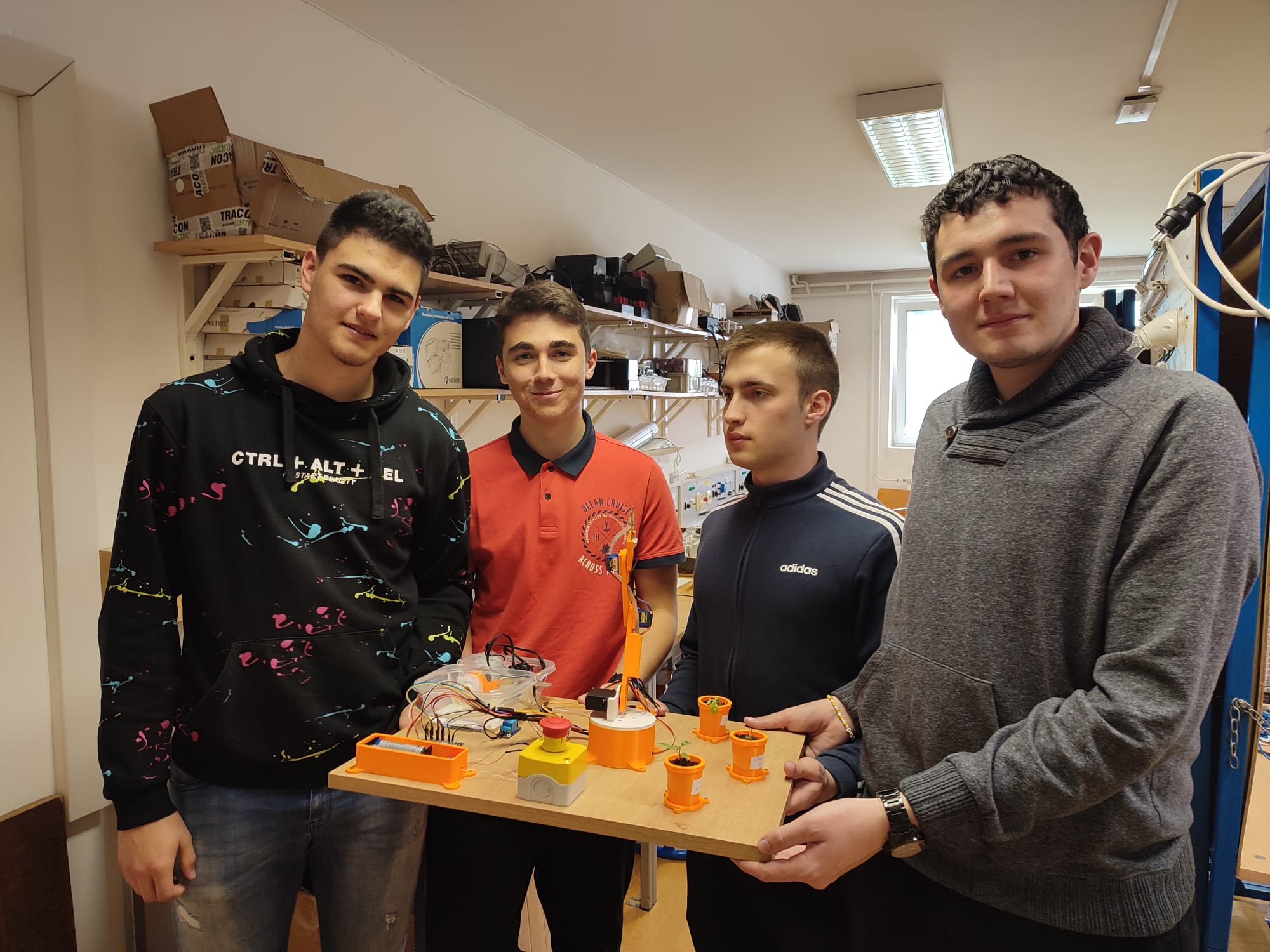
Robotska ruka spušta senzor vlage u posudu za biljku te ostaje u tom položaju određeno vrijeme. Ako senzor očita dovoljnu vlažnost robotska ruka ga podiže te prelazi na sljedeću posudu. Druga mogućnost je da senzor očita nedovoljnu vlažnost. U tom slučaju pomoću releja se aktivira pumpa koja će na određeno vrijeme ispuštati vodu. Nakon toga ruka prelazi na sljedeću posudu. Željenu vlažnost možemo namještati pomoću potenciometra.
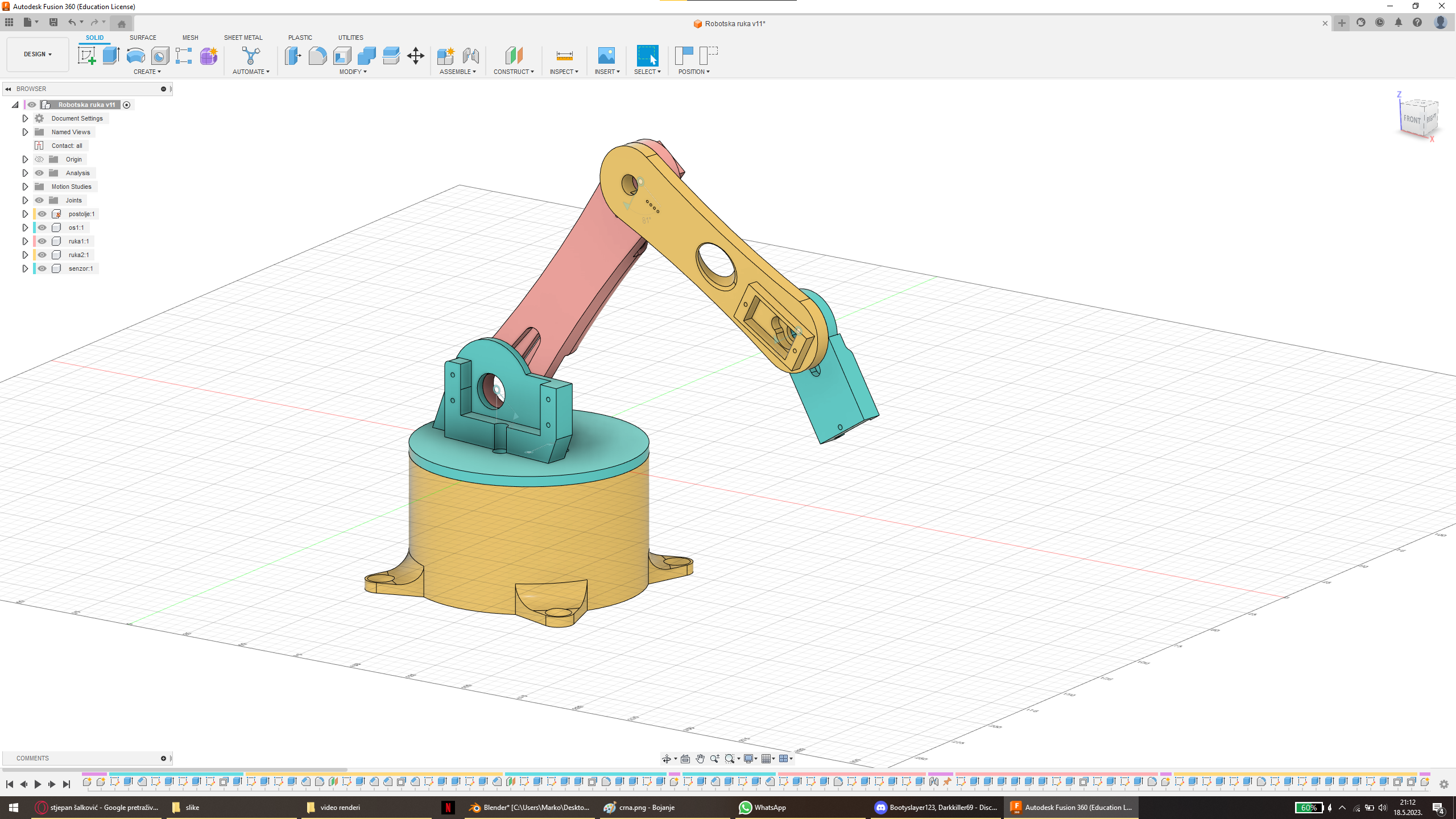
Robotska ruka se sastoji od 4 djela koja su ispisana 3D pisačem. Na njoj su 4 servo motora i senzor vlage. Upravljanje se obavlja preko Dasduino ESP32 mikroupravljača. Napajanje se vrši preko dvije 18650 lithium-ion baterije od 3,7V spojenih preko step down-a. Za zalijevanje koristimo pumpu za koju smo isprintali dijelove koja se kontrolira preko releja. Pomoću 3D pisača smo ispisali 3 posude za biljke sa njihovim držačima te kućište za step down. Modele smo izrađivali u Fusion 360, CATIA-i, PrusaSlicer, Tinkercad, Arduino IDE.







Mentor:
Goran Dolovčak, Stjepan Šalković
Učenici:
Marko Kiseljak, Domagoj Pavlek, Ivan Kozina, Luka Štibohar