16 svi Pokretni robotski manipulator
Posted at 21:29h
in Nekategorizirano
by Saša Tatar
Elektrotehnička škola, Zagreb
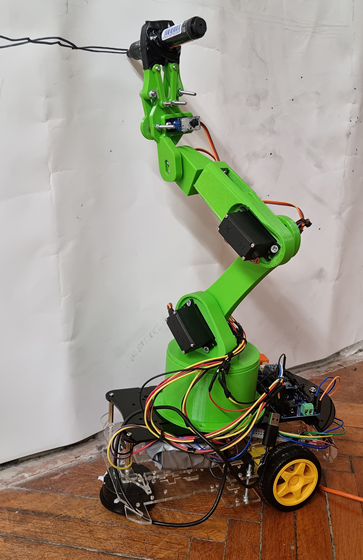
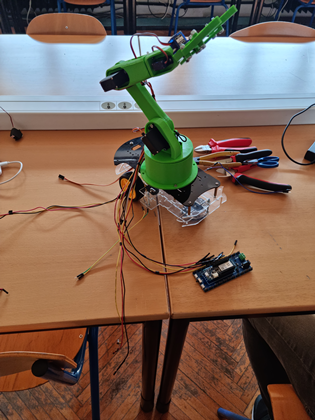
Pokretni robotski manipulator – robotska ruka na pokretnoj platformi upravljano pomoću Blynk aplikacije.
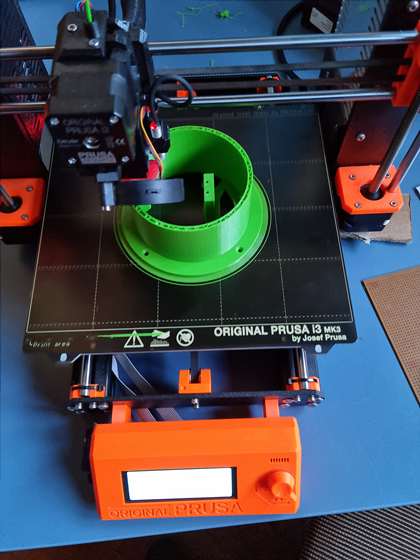
Dijelovi ruke crtani u Fusion 360 te printani na Prusa i3 MK3 printeru sa PETG filamentom.
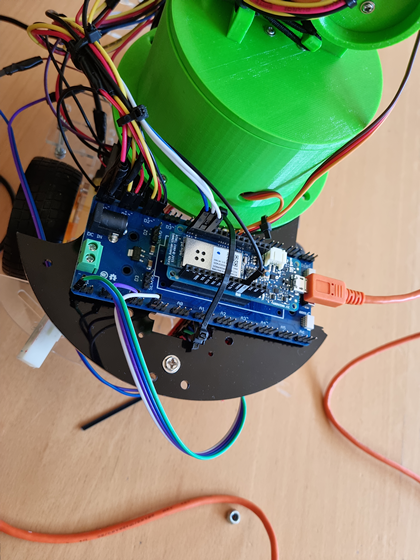
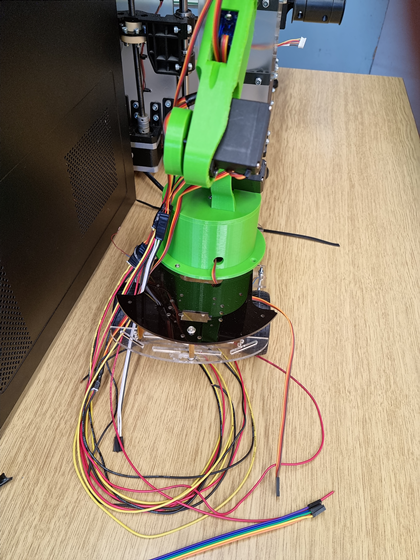
Mikroupravljač je MKR1000, napajanje powerbank, 6 servo motorića (3kom SG90 i 3kom MG996R) za upravljanje rukom, te 2 DC motorića za pokretanje platforme.
Na Blynk aplikaciji se nalazi 6 slidera za upravljanje servo motorima, te dva tipkala za napred i nazad kretanje platforme.
Fotogalerija stvaranja projekta




Videoprezentacija projekta
Autori projekta
Mentor:
Saša Tatar
Učenici:
Ian Jelen i Ivan Antunović