11 svi Vrata za kućne ljubimce
OŠ Franje Krežme
Vrata za kućne ljubimce rade pomoću međusobne komunikacije dvije Arduino pločice, MKR1000 i Arduino Uno. Arduino MKR1000 upravlja s procesom otključavanja i zaključavanja vrata, prati nalazi li se kućni ljubimac ispred vrata te provjerava vlažnost i temperaturu zraka na vanjskoj strani vrata. Arduino Uno postavljen je kako bi koristio RFID senzor pomoću kojeg prepoznaje kućnog ljubimca s određenom RFID oznakom te samo njemu otključava vrata.
 Testiranje senzora na eksperimentalnoj pločici.
Testiranje senzora na eksperimentalnoj pločici. Lemljenje i postavljanje senzora.
Lemljenje i postavljanje senzora. Izrada programa.
Izrada programa. Ožičavanje projekta.
Ožičavanje projekta. “Šminkanje” i posljednje sređivanje koda.
“Šminkanje” i posljednje sređivanje koda.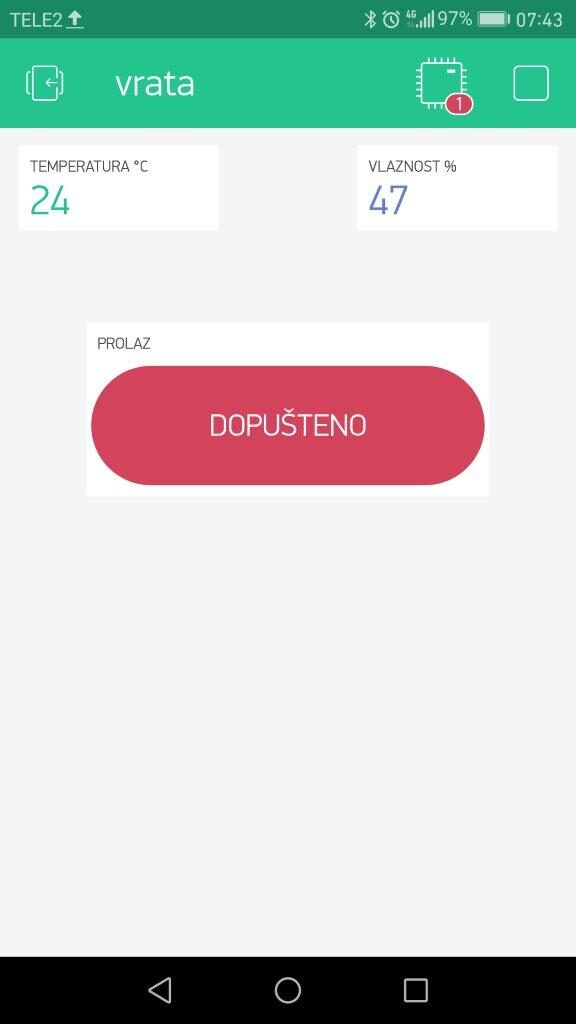
Mobilna aplikacija povezana je s Arduinom MKR1000. Na zaslonu pametnog telefona korisniku se prikazuju vanjski vremenski uvjeti, vlažnost i temperatura zraka, pomoću kojih korisnik odlučuje hoće li dopustiti svome kućnom ljubimcu prolazak kroz vrata ili će zabraniti. Vremenski uvjeti očitavaju se pomoću DHT11 senzora vlage i temperature te se podatci šalju svakih 30 sekundi na mobilnu aplikaciju. Dozvola prolaska radi pomoću prekidača. Ako je prolaz zabranjen bez obzira nalazi li se kućni ljubimac ispred vrata, ona ostaju zaključana. Ako je prolaz dozvoljen, vrata su zaključana sve dok se kućni ljubimac ne približi vratima s vanjske ili unutarnje strane.
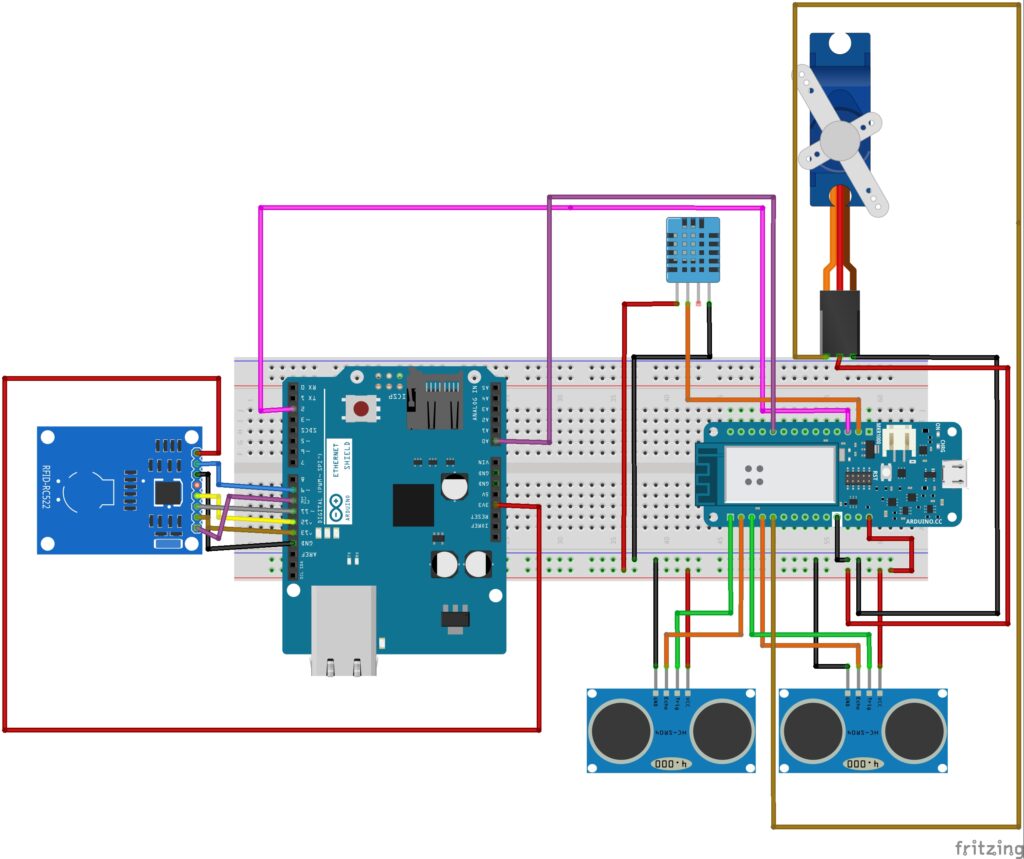
Shema prikazuje priključene senzore i međusobnu povezanost oba korištena Arduina.
Shemu ovoga projekta možete preuzeti ovdje.
#define BLYNK_PRINT /*
#define BLYNK_PRINT SerialUSB
#include
#include
#include
#include
#include “Servo.h”
#include
#include
#define DHTPIN A0
#define DHTTYPE DHT11
const int trigPin1 = 6;
const int echoPin1 = 7 ;
const int trigPin2 = 8;
const int echoPin2 = 9 ;
int rsig=digitalRead(A1);
int sig=1;
int prekidac;
long trajanje1 ;
int udaljenost1;
long trajanje2;
int udaljenost2;
DHT dht(DHTPIN, DHTTYPE);
Servo servo;
int pos;
char auth[] = “2c63cb58555045598dd1fb0842c978e4”;
char ssid[] = “pametnakuca”;
char pass[] = “kuca1234”;
BLYNK_WRITE(V10)
{
prekidac = param.asInt();
}
void setup() {
Blynk.begin(auth, ssid, pass);
pinMode(trigPin1, OUTPUT);
pinMode(echoPin1, INPUT);
pinMode(trigPin2, OUTPUT);
pinMode(echoPin2, INPUT);
pinMode(rsig, INPUT);
pinMode(sig, OUTPUT);
Serial.begin(9600);
servo.attach(10);
dht.begin();
}
void loop() {
Blynk.run();
float h = dht.readHumidity();
float t = dht.readTemperature();
rsig=digitalRead(A1);
Blynk.virtualWrite(V11,t);
Blynk.virtualWrite(V12, h);
if(prekidac==LOW){
servo.write(90);
}else {
if (rsig==LOW){
ultrazvuk();
} else {
servo.write(180);
delay(3000);
}
}
}
void ultrazvuk(){
servo.write(90);
digitalWrite(trigPin1, LOW);
delayMicroseconds(20);
digitalWrite(trigPin1, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin1, LOW);
trajanje1 = pulseIn(echoPin1, HIGH);
udaljenost1 = trajanje1 * 0.034 / 2;
digitalWrite(trigPin2, LOW);
delayMicroseconds(20);
digitalWrite(trigPin2, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin2, LOW);
trajanje2 = pulseIn(echoPin2, HIGH);
udaljenost2 = trajanje2 * 0.034 / 2;
if(udaljenost1<15 or udaljenost2<15){
digitalWrite(sig, HIGH);
} else {
digitalWrite(sig, LOW);
}
}
Program za Arduino MKR1000 možete preuzeti ovdje.
#define BLYNK_PRINT /*
#include
#include
#define SS_PIN 10
#define RST_PIN 9
MFRC522 mfrc522(SS_PIN, RST_PIN);
int uz=analogRead(A0);
void setup(){
Serial.begin(9600);
SPI.begin();
mfrc522.PCD_Init();
pinMode(2, OUTPUT);
pinMode(uz, INPUT);
}
void loop()
{
uz=analogRead(A0);
if (uz<500){
digitalWrite(2, LOW);
}else {
kartica();
}
}
void kartica() {
if ( ! mfrc522.PICC_IsNewCardPresent())
{
return;
}
if ( ! mfrc522.PICC_ReadCardSerial())
{
return;
}
String content= “”;
byte letter;
for (byte i = 0; i < mfrc522.uid.size; i++)
{
Serial.print(mfrc522.uid.uidByte[i] < 0x10 ? ” 0″ : ” “);
Serial.print(mfrc522.uid.uidByte[i], HEX);
content.concat(String(mfrc522.uid.uidByte[i] < 0x10 ? ” 0″ : ” “));
content.concat(String(mfrc522.uid.uidByte[i], HEX));
}
content.toUpperCase();
if (content.substring(1) == “84 D3 41 83”){
digitalWrite(2, HIGH);
delay(2000);
digitalWrite(2, LOW);
}
}
Program za Arduino Uno možete preuzeti ovdje.
Projekt su izradili Jona Važić i Helena Floreani uz mentorstvo Tomislava Pandurića iz OŠ Franje Krežme.
Projekt je prijavljen na temu: Internet of Things: Kućni ljubimci i domaće životinje.