11 svi IoT Pametni grad
Udruga korisnika Wireless sustava Beli Manastir
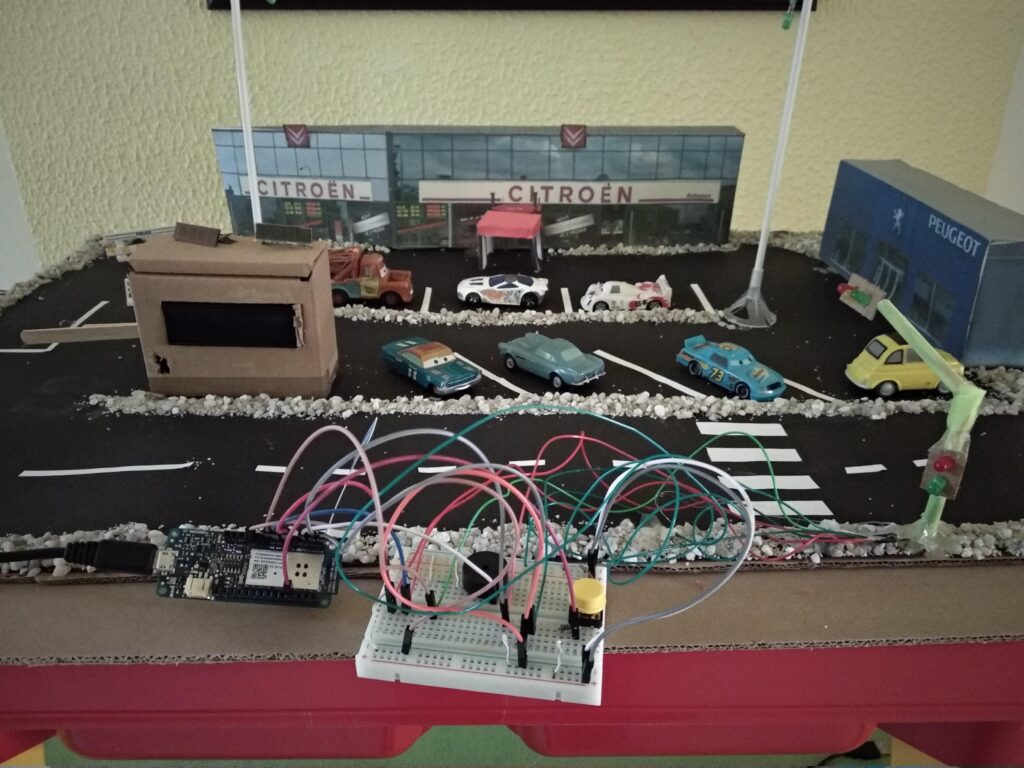
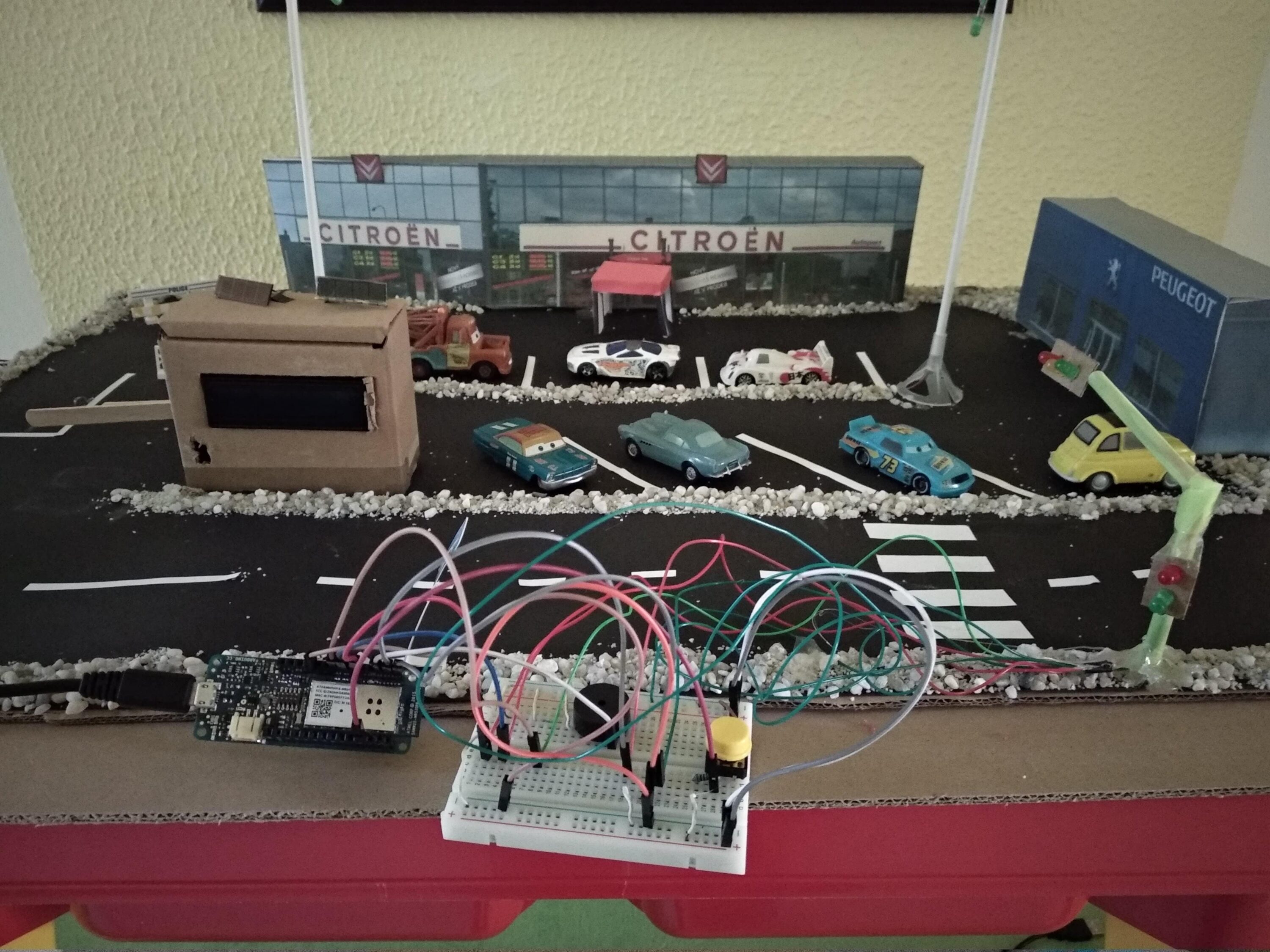
U ovom projektu ćemo vam predstaviti našu viziju pametnog grada. Parkiralište je koncipirano tako da pridonosi zaštiti i očuvanju okoliša i smanjivanju ispušnih CO2 plinova iz automobila kao i smanjenju potrošnje goriva. Također smanjuje i vijeme potrebno da se nađe slobodno parkirno mjesto a time si smanjujemo vrijeme vožnje i štedimo si na vremenu. Parkirališta se mogu spojiti nekoliko u jednu cijelinu mi ćemo prezentirati samo jedno koje može biti dio cijeline od 4,5,6 parkirališta. Nadzemno,podzemno ili na više katova opcija ima nekoliko.
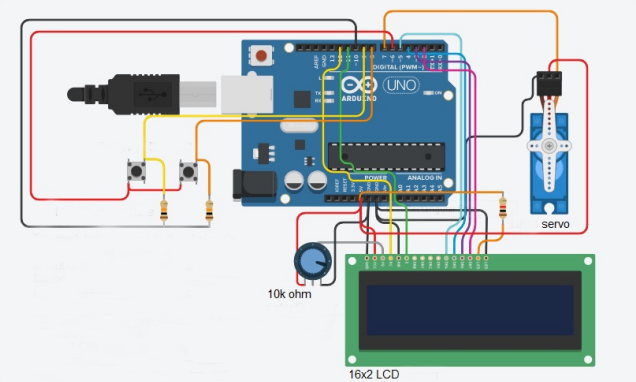
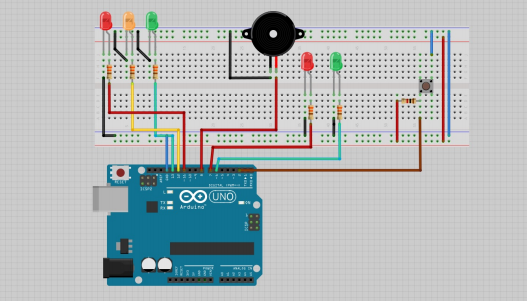
Na Arduino pločicu smo spojili servo LCD i za početak dva tipkala koji su poslije ostali za opciju manualnog upravljanja ako sustav prepoznavanja automobila ne radi te smo na njih spojili senzor koji očitava težinu, u ovom slučaju automobila, a koji je glavni za korištenje.
Nakon što se vozač približi rampi i senzor očita prisutnost automobila, otvara rampu ukoliko ima dovoljno parkirnih mjesta ili ju ne otvara ako je sve zauzeto tj. ako nema slobodnih parkirnih mjesta.
Na displayu vozač može vidjeti količinu slobodnih ili zauzetih parkirnih mjesta, a ukoliko ima slobodnih ne mora se nepotrebno voziti u potrazi za parkiralištem.
Time se štedi gorivo, smanjuje količina ispušnih plinova i smanjuje amortizacija automobila. A vozač smanjuje i svoje vrijeme čekanja te se može bolje organizirati.


Parkirališnu rampu otvara i zatvara senzor težine ugrađen u asfalt (papir na diorami). Postoji i opcija manualnog otvaranja i zatvaranja putem tipkala u slučaju mogućeg kvara ili sličnih problema te opcija, ukoliko je primjerice parkiralište privatno ili rezervirano da korisnici sami otvaraju rampu putem mobilne aplikacije ili ako je naplatno da dobiju informacije o slobodnim ili zauzetim parkirirnim mjestima. Ako je parkiralište naplatno, sustav se može nadograditi da mjeri vrijeme i nakon toga vrši naplatu parkiranja.
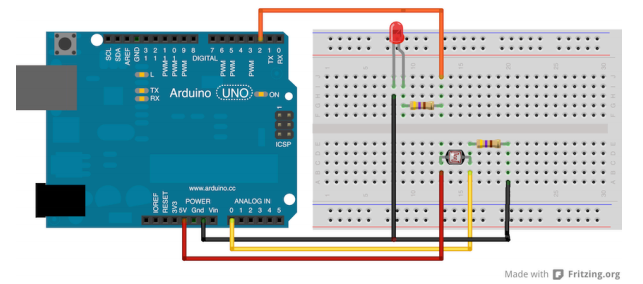
U smjeru zaštite okoliša i uštede energije napravili smo i rasvjetu koja se pali samo kada padne količina svijetla na minimum za osvjetljenje čime se štedi električna energija i automatizira proces kontrole ulične rasvjete. I nju je također moguće koristiti putem mobilne aplikacije te zadavati dodatne parametre kao što su vrijeme paljenja i gašenja, količina svjetla na kojoj se rasvjeta upali ili ugasi, a sve u što većoj energetskoj učinkovitosti sustava.
Shema spajanja je jednostavna jer smo na fotosenzor spojili led lampice preko Arduina pomoću kojega je moguće mijenjati parametre paljenja i gašenja i upravljati na daljinu.
U projekt smo dodali i semafor koji signalizira automobilima da moraju stati na obilježenom pješačkom prijelazu nakon što pješak pritisne tipkalo ili nakon što program sam izvrti petlju paljenja i gašenja semafora po zadanim parametrima.
Semafor ima i zvučno upozorenje za osobe slabog i oštećenog vida koji ih upozorava na vrijeme rada semafora za pješake kako bi mogli pratiti cikluse paljenja i gašenja zelenog svijetla te tako sigurno prijeći pješački prijelaz. Spajanje je vrlo jednostavno jer se svaka ledica spoji na svoj izlaz, kao i tipkalo i buzzer. Programski se sve poveže, napiše petlja koja se vrti ili ako se pritisne tipkalo, pokreće se potprogram za pješake.
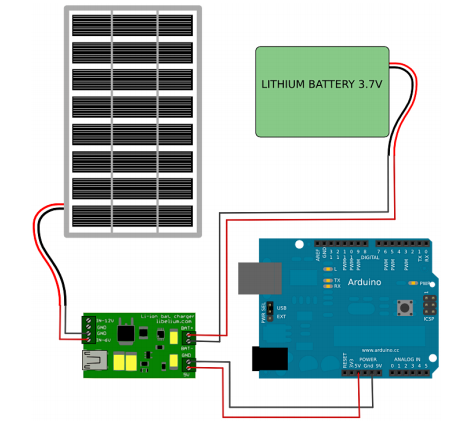
Cijeli sustav spojen je na bateriju koja napaja pojedinačno parkiralište, semafor i rasvjetu. Puni se putem mini solarnih kolektora koji su spojeni na bateriju pa tako sustav može biti neovisan o električnoj energiji za samostalni ili pričuvni rad ako nestane električne energije ovisno kako je spojen i koje su potrebe na određenim lokacijama. Za to smo koristili dodatni modul za punjenje putem solara za Arduino.
/*
*/
#include
#include
LiquidCrystal lcd(12,11,5,4,3,2);//connected to RS,EN,D4,D5,D6,D7 of LCD display respectively
Servo myservo; //
#define ServoM 7 //servo motor.
#define Exit 9 //Pin za izlazni senzor,tipkalo.
#define In 8 //Pin za ulazni senzor,tipkalo.
#define Pwr 6 //Dodatni pin za napajanje senzora(Ne spajajte servo na njega!)
#define Gnd 10 //Dodatno uzemljanje za senzore(Ne spajajte servo na njega!)
#define BarLow 90 //Najniža pozicija rampe.
#define BarUp 177 //Najvišlja pozicija rampe.
#define CAPACITY 7 //Broj parkirališnih mjesta.
void setup(){
myservo.attach(ServoM); // spajanje serva.
lcd.begin(16,2);
lcd.print(“Space left for”);
pinMode(Gnd, OUTPUT);
pinMode(Pwr, OUTPUT);
pinMode(Exit, INPUT); // Izlazni senzor
pinMode(In, INPUT); // Ulazni senzor
digitalWrite(Gnd, LOW);
digitalWrite(Pwr, HIGH);
myservo.write(BarLow); //Rampa u najnižoj poziciji
// delay(1000);
}
int Available= 7; // Broj slobodnih parkirališnih mjesta
//================================================================
void loop(){
if (Available == 1){ //Ako je jedno mjesto slobodno
lcd.clear(); //Očisti LCD
lcd.setCursor(1,0);
lcd.print(“Slobodno za”);//Ispiši Slobodno za .
lcd.setCursor(0,1);
lcd.print(Available); //Ispiši koliko je mjesta slobodno
lcd.print(” auta”);
}else{
if (Available >= 1){
lcd.clear();
lcd.setCursor(1,0);
lcd.print(“Slobodno za”);
lcd.setCursor(0,1);
lcd.print(Available);
lcd.print(” auta”);
}else{
lcd.clear();
lcd.setCursor(1,0);
lcd.print(“Nema”);
lcd.setCursor(0,1);
lcd.print(“slobodnih mjesta!”);
}
}
if(digitalRead(In)==1) //Ako je ulazni senzor osjetio prisutnost automobila kod ulaska.
{
if(Available != 0){ //Provjera slobodnih mjesta.
Available–; //Izračun slobodnih mjesta iz memorije.
myservo.write(BarUp); //Podiže rampu gore.
delay(3000); //Čeka 3 sec za prijelaz auta(može se mjenjati vrijednost).
myservo.write(BarLow);//Spuštanje rampe.
}
}
if(digitalRead(Exit)==1) //Ako je izlazni senzor osjetio prisutnost automobila kod izlaska.
{
if(Available != CAPACITY){
Available++;
myservo.write(BarUp);
delay(3000);
myservo.write(BarLow);
}
}
delay(20);
}
Projekt su izradili Dorotea Taslidžić i Bruno Taslidžić uz mentorstvo Daniela Taslidžića iz Udruge korisnika Wireless sustava Beli Manastir .
Projekt je prijavljen na temu: Pametan grad.