18 tra „Spusti me!”
Zadatak
Izradite kôd prema kojemu će se mBot „buniti“ svaki put kad ga se podigne s podloge na kojoj se nalazi. Kad ga se podigne neka okretanjem kotača lijevo-desno i istovremenim mijenjanjem boja na svjetlećim diodama (crvena i plava) u kratkim izmjenama od 0.2 sekunde. Kad ga se spusti natrag na podlogu neka se kotači umire, a svjetleće diode neka svijetle ljubičasto.
Rješenje
Objašnjenje
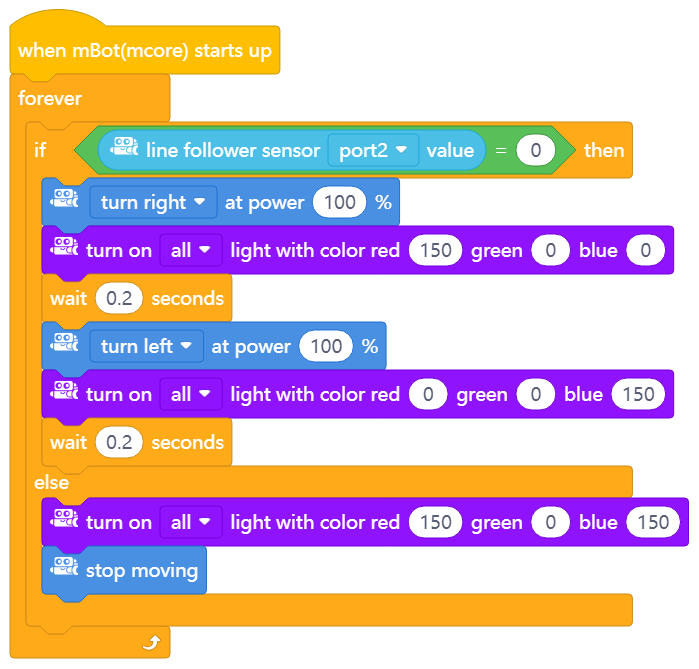
Robot reagira kad ga se podigne s površine. Svaki put kad je podignut, okreće kotače kao da skreće desno-lijevo paleći obje svjetleće diode crveno pa plavo. Kad ga se spusti, svjetleće diode svijetle ljubičasto te robot miruje. Da bi se ovaj program izvršavao neprestano, sve su naredbe smještene unutar forever petlje. Dvije su mogućnosti: robot podignut i robot spušten. Ako je robot podignut (if line follower sensor port2 value = 0), robot će najprije kotače okrenuti udesno (turn right at power 100%) i zasvijetliti crveno (turn on all light with color red 150 green 0 blue 0) u trajanju od 0.2 sekunde (wait 0.2 seconds), a zatim će okrenuti kotače ulijevo (turn left at power 100%) i zasvijetliti plavo (turn on all light with color red 0 green 0 blue 150) u jednakom trajanju. To će se događati dokle god je robot u zraku. Kad ga se spusti (vrijednost senzora za praćenje linije više nije 0), tada svjetleće diode svijetle ljubičasto (turn on all light with color red 150 green 0 blue 150) i robot miruje (stop moving).
Objašnjenje
Robot reagira kad ga se podigne s površine. Svaki put kad je podignut, okreće kotače kao da skreće desno-lijevo paleći obje svjetleće diode crveno pa plavo. Kad ga se spusti, svjetleće diode svijetle ljubičasto te robot miruje. Da bi se ovaj program izvršavao neprestano, sve su naredbe smještene unutar forever petlje. Dvije su mogućnosti: robot podignut i robot spušten. Ako je robot podignut (if line follower sensor port2 value = 0), robot će najprije kotače okrenuti udesno (turn right at power 100%) i zasvijetliti crveno (turn on all light with color red 150 green 0 blue 0) u trajanju od 0.2 sekunde (wait 0.2 seconds), a zatim će okrenuti kotače ulijevo (turn left at power 100%) i zasvijetliti plavo (turn on all light with color red 0 green 0 blue 150) u jednakom trajanju. To će se događati dokle god je robot u zraku. Kad ga se spusti (vrijednost senzora za praćenje linije više nije 0), tada svjetleće diode svijetle ljubičasto (turn on all light with color red 150 green 0 blue 150) i robot miruje (stop moving).