18 tra Praćenje bijele linije na crnoj podlozi s lijeve strane
Zadatak
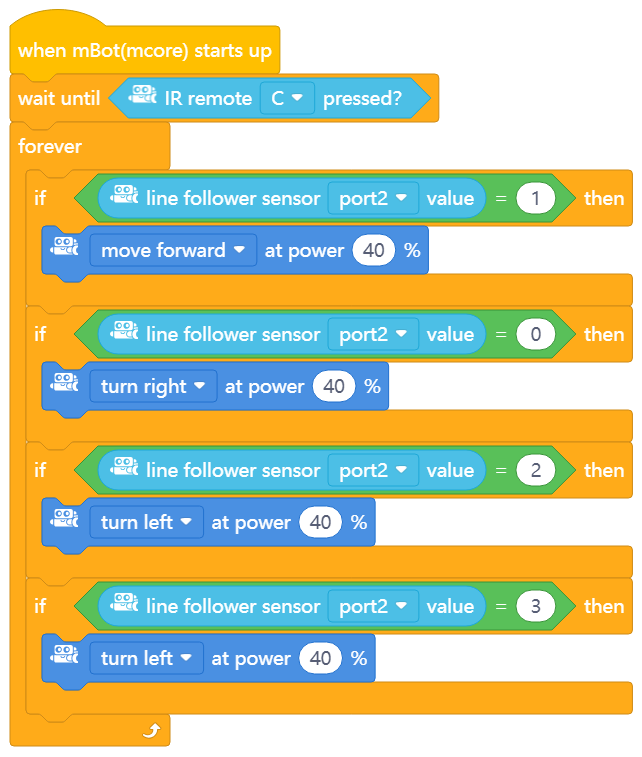
Izradite program kojim će se mBot kretati po svijetloj liniji s lijeve strane.
Rješenje
Objašnjenje
Robot započinje s kretanjem pritiskom na tipku C na daljinskom upravljaču (wait until IR remote C pressed). Robot vozi ravno kada je lijevi senzor na tamnoj površini, a desni na svijetloj liniji (vrijednost 1). Ako senzor za praćenje linije ima vrijednost 0, to znači da je s oba senzora na tamnoj podlozi te će skretati desno dok ponovno ne dođe desnim senzorom do svijetle linije i poprimi vrijednost 1. Kada s desnim senzorom robot izađe na tamnu podlogu, a s lijevim ostaje na svijetloj (vrijednost 2), robot skreće lijevo kao i u slučaju kada su oba senzora na svijetloj podlozi (vrijednost 3), kako bi se pozicionirao da lijevi senzor bude na tamnoj, a desni na svijetloj površini (vrijednost 2) i nastavio s kretanjem ravno.