18 tra Oprez, visoko!
Zadatak
Napravite program kojim će se mBot kretati ravno po nekoj uzdignutoj površini (primjerice na stolu) te se zaustaviti kad dođe do ruba stola.
Rješenje
Objašnjenje
Pomoću senzora za praćenje linije robot može detektirati da je došao do ruba površine kojom se kreće. Bitno je da je površina po kojoj se robot kreće svijetla. Ako se robot kreće ravno naprijed, primjerice na stolu, i dođe do ruba stola, udaljenost od poda je prevelika za reflektiranje infracrvenog svjetla stoga senzor poprima vrijednost 0 (kao da je na tamnoj površini). U tom slučaju ovim programom je zadano da robot stane. Inače se kreće ravno.
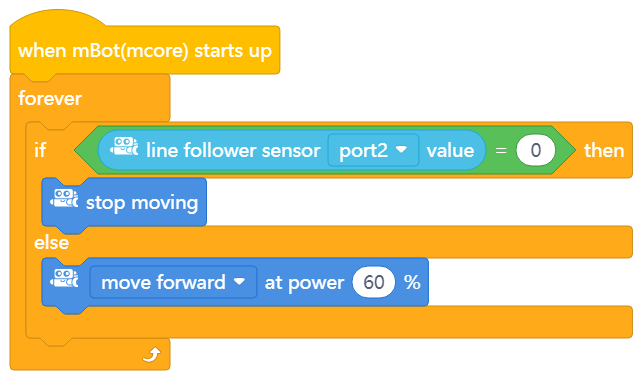
U forever petlji smještena je if then petlja kojom je definirano da ako oba senzora očitavaju vrijednost nula (if line follower sensor port2 value = 0), robot staje (stop moving). Inače (else) neka se kreće ravno (move forward at power 60%).