09 ožu Kretanje Robotic Arm Tanka po kružnici
Izradite program kojim će se Robotic Arm Tank kretati po kružnici. Izradom ovog programa naučit ćete kako definirati svoje blokove kôda te ih uvrstiti u program za izvršavanje.
Program možete izmijeniti tako da povećate ili smanjite polumjer kruga te ubrzate ili usporite kretanje robota. Možete i promijeniti smjer kretanja (u smjeru kazaljke na satu ili obrnuto).

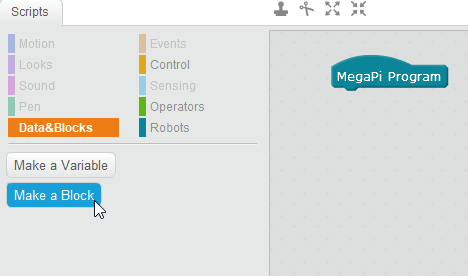
Iz kategorije Data&Blocks odaberite opciju Make a Block.
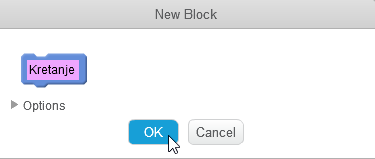
Otvorit će se prozorčić u kojem upisujete ime bloka. Upišite Kretanje i stisnite OK.

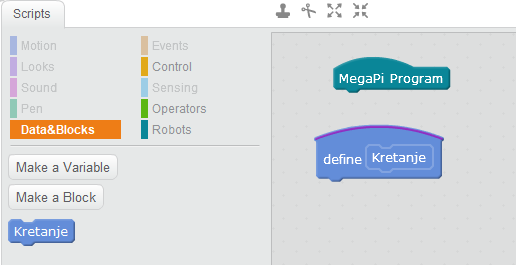
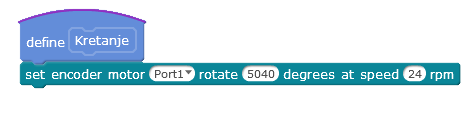
Nakon toga se u prostoru za programiranje pojavljuje blok Kretanje ispod kojeg ćemo postaviti naredbe koje će se izvršavati tim blokom.
Želimo da se robot kreće u krug pa ćemo iz kategorije Robots dodati naredbu set encoder motor Port1 rotate 1000 degrees at speed 180 rpm. Argumente ove naredbe promijenili smo na 5040 stupnjeva, a brzinu smanjili na 24 rpm. Time smo definirali brzinu kretanja vanjske (lijeve) gusjenice robota.
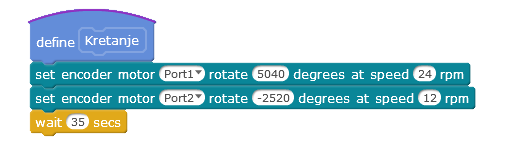
Dodajmo sada naredbu za brzinu kretanja unutarnje gusjenice. Desnim klikom na naredbu za kretanje vanjske gusjenice kliknite na duplicate. Smjestite naredbu ispod i promijenite argumente. Unutarnja gusjenice je na Portu2, stupnjevi moraju biti negativan broj čija apsolutna vrijednost mora biti manja od apsolutne vrijednosti stupnjeva vanjske gusjenice. Mi smo odredili da apsolutna vrijednost stupnjeva unutarnje gusjenice bude duplo manja od stupnjeva vanjske, te da se ona kreće duplo sporije (12 rpm).

Na kraju ovog bloka dodat ćemo i vrijeme unutar kojeg želimo da se robot kreće po kružnici.
U bloku za kretanje definirali smo vrijeme za kretanje te će nakon tog vremena robot stati, ali motor će ostati po opterećenjem. Stoga ćemo kreirati novi blok kojim će motori prestati raditi nakon što se robot zaustavi.
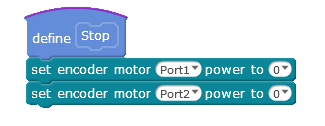
Ponovno iz kategorije Data&Blocks odaberite Make a Block i nazovite ga Stop.
Za taj blok dodajte naredbu set encoder motor Port1 power to 0. Kopirajte tu naredbu i promijenite Port1 u Port2. Time smo za blok Stop definirali da se motori ugase.
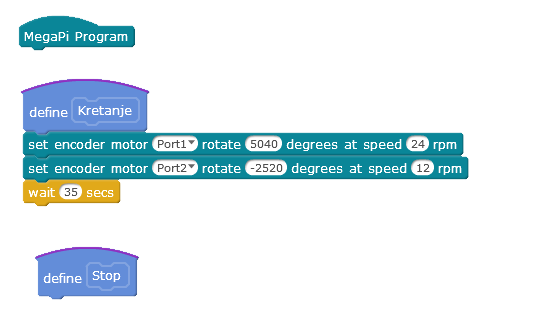
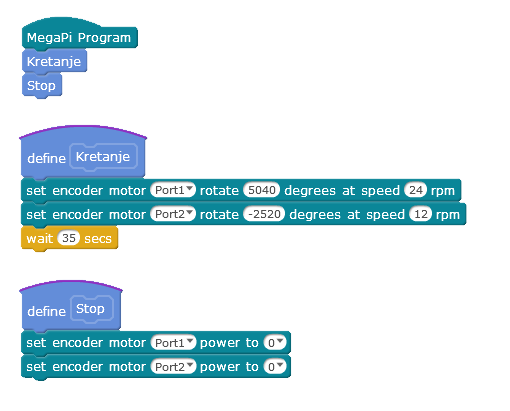
Trenutno kôd izgleda kao na slici.

Sada je potrebno u MegaPi blok dodati definirane blokove. Iz Data&Blocks povucite blok Kretanje i smjestite ga ispod MegaPi Programa te nakon toga učinite to isto za blok Stop. Time ste završili izradu ovog programa pomoću kreiranja svojih blokova kôda.
Prebacite program na robota i pogledajte kako se robot kreće.