21 pro Korištenje micro:Maqueen robota s HuskyLens kamerom
HuskyLens kamera se može koristiti kao dodatna komponenta (senzor) uz micro:bit i micro:Maqueen Plus robot. Kako bi robot mogao koristiti kameru za svoj rad, potrebno ih je povezati.
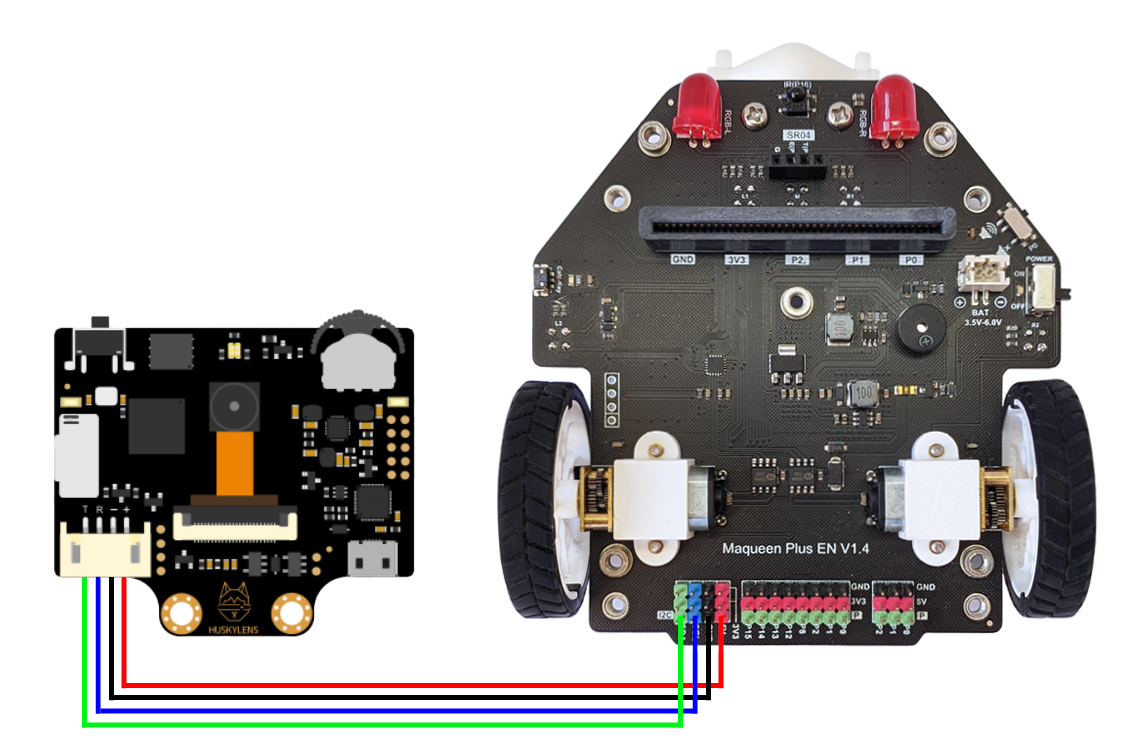
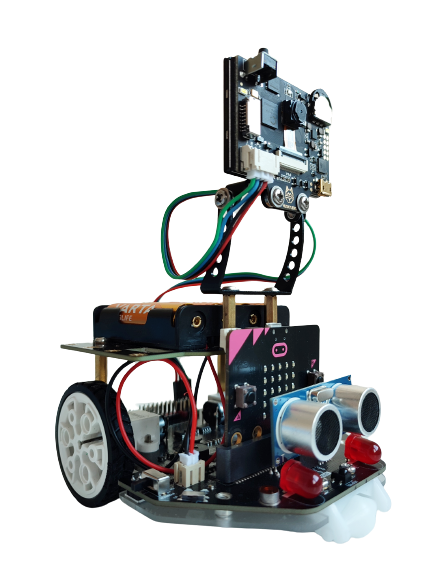
Za fizičko povezivanje kamere i robota spojite kameru I2C kabelom s izvodima robota na predviđenom mjestu za dodatne priključke na robotu kako je prikazano na slici. Vodite računa da kablove spojite ispravnim redoslijedom: crveni kabel spojite na izvod 5V, crni na GND, plavi na SCL i zeleni na SDA.
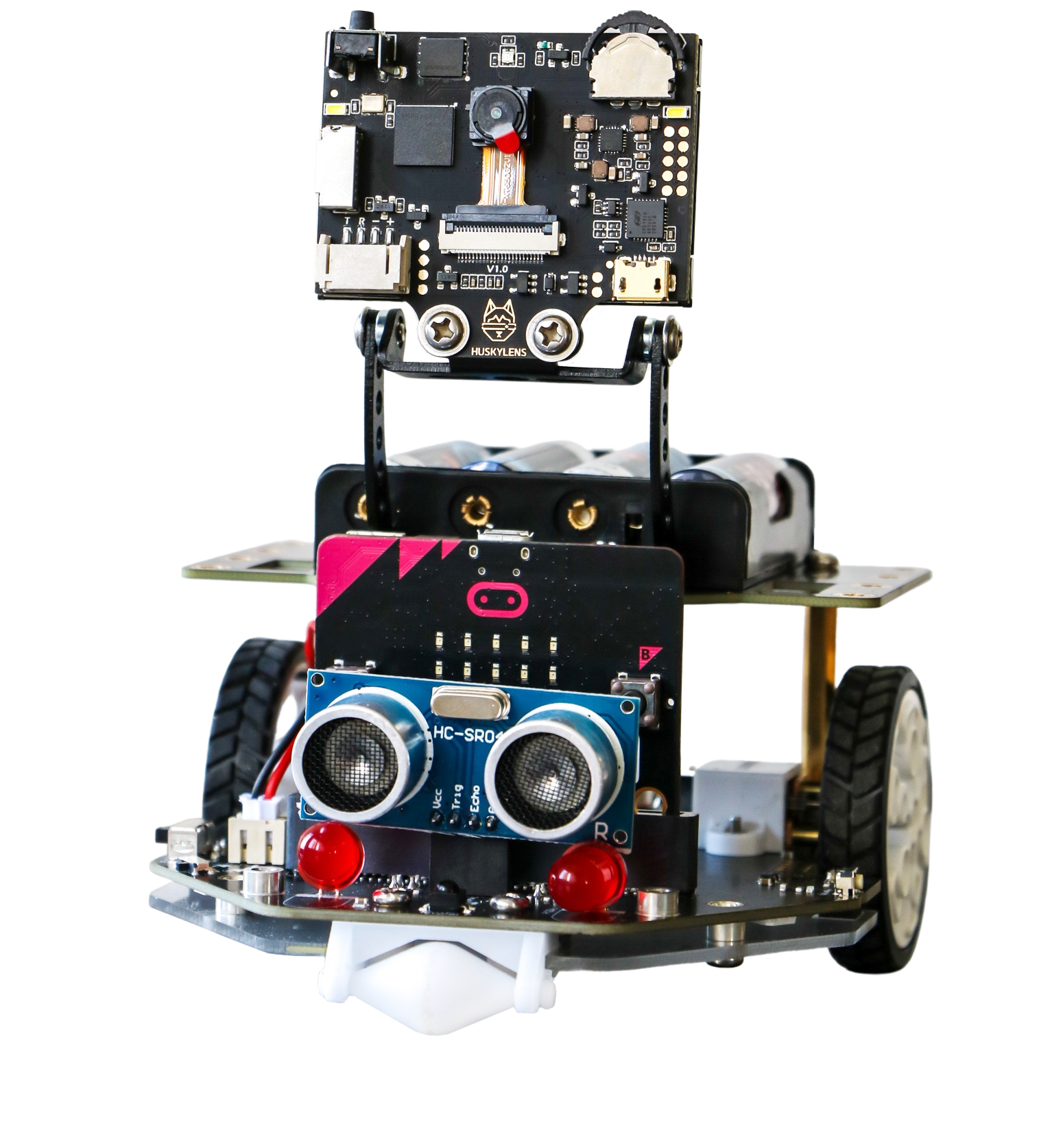
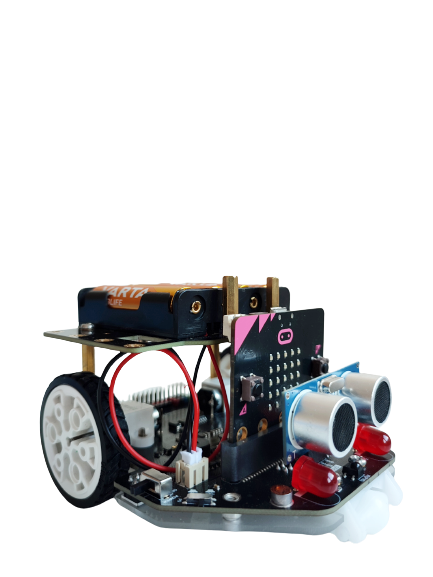
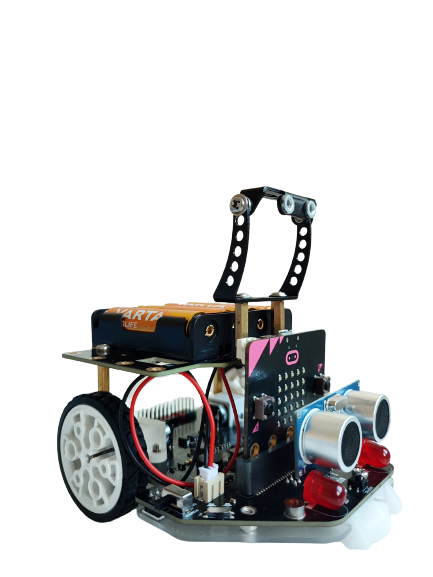
Kameru pričvrstite na robot iznad ultrazvučnog senzora, kako je prikazano na slikama u 4 koraka. Upotrijebite vijke, matice i metalne spojne dijelove koji dolaze uz kameru te 2 odstojnika zlatne boje koja ste dobili uz robota. Bit će vam potreban i odvijač.

Da bi kamera i robot mogli komunicirati, potreban je i micro:bit (upravljačka pločica za pohranu i izvršavanje programa). Micro:bit će od kamere dobiti informaciju o tome što kamera vidi i prepoznaje te će ovisno o tome regulirati rad robota, primjerice – robot će se kretati u različitim smjerovima ovisno o detektiranom licu.
Postoje dva softvera za programiranje micro:bita za upravljanje micro:Maqueen Plus robotom uz HuskyLens kameru. To su MakeCode Editor (pristupa mu se putem internetske stranice: https://makecode.microbit.org/) i Mind+ grafički softver za programiranje.
U ovom tečaju su prikazani primjeri programa izrađeni u Mind+ programu.
Sadržaj materijala isključiva je odgovornost Instituta za razvoj i inovativnost mladih.

Projekt je 85% financiran iz EGP financijskog mehanizma, a 15% financiran iz državnog proračuna.