16 tra Infracrvena komunikacija
Pomoću infracrvene komunikacije roboti mogu izmjenjivati poruke. Za svaki robot potrebno je napisati poseban program kako bi svaki robot „znao“ što treba učiniti kad pošalje ili primi određenu poruku.
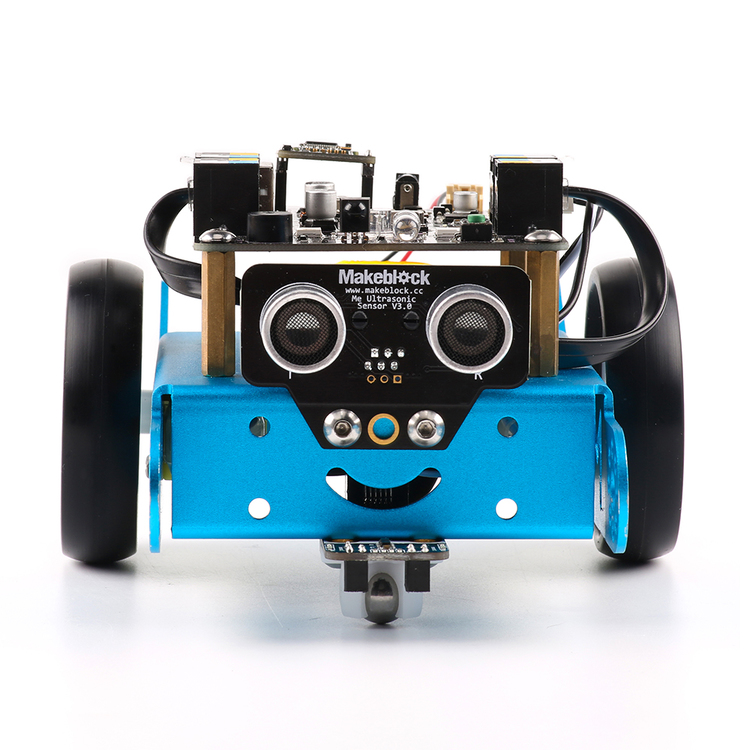
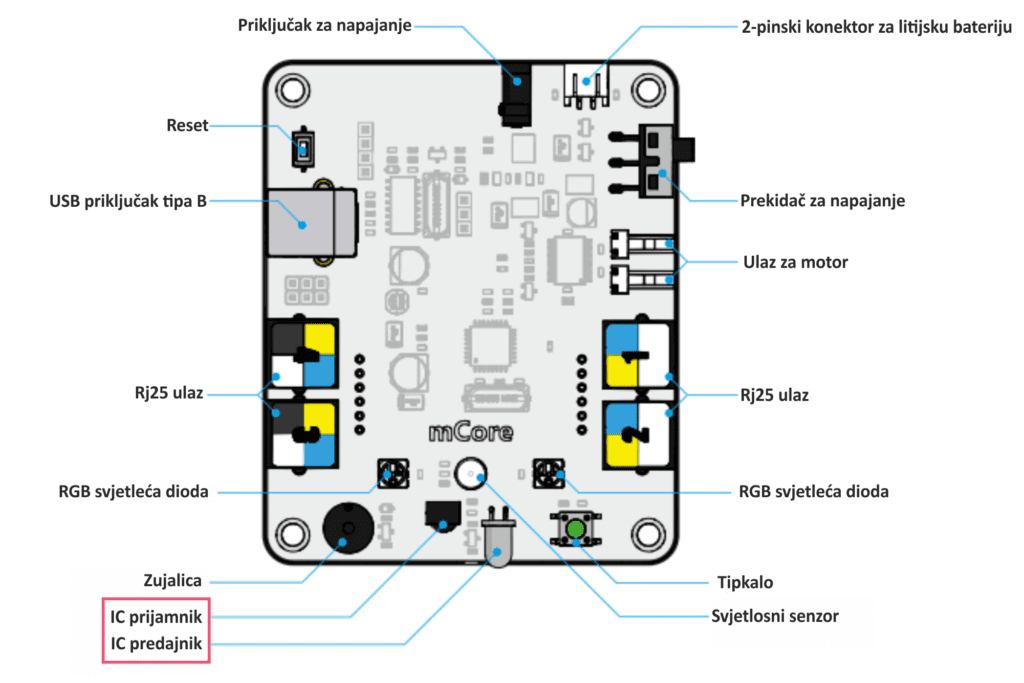
Na upravljačkoj pločici između tipkala i zujalice smješteni su infracrveni predajnik i prijemnik. Preko prijemnika robot, osim primanja poruke od drugog robota, može primiti i signal od daljinskog upravljača.
Prilikom izvršavanja programa kojima dva robota komuniciraju potrebno je osigurati da između njih nema većih fizičkih prepreka koje bi tu komunikaciju onemogućile.
Naredbe za infracrvenu komunikaciju nalaze se u mBlock programu pod kategorijom Sensing.
Naredba
Objašnjenje

Provjerava koja je tipka na daljinskom upravljaču pritisnuta i poslana u obliku poruke.

Naredba za slanje poruke.

Naredba za urovjeravu primljene poruke.
Pokreni drugog robota porukom
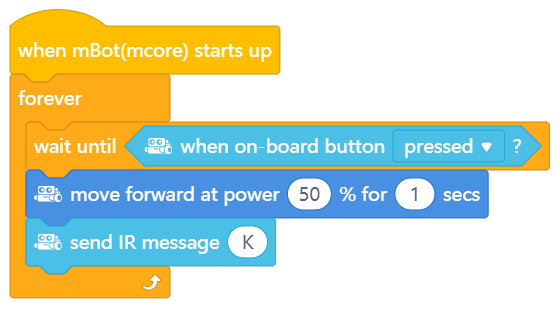
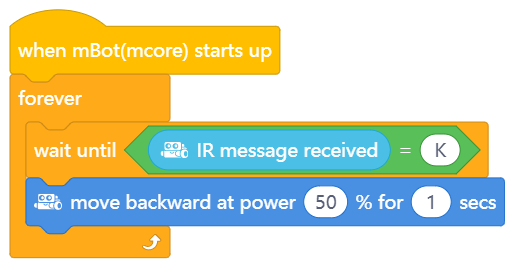
Jedan robot porukom pokreće drugog robota. Prvi robot kreće s vožnjom nakon pritiska na tipkalo i vozi ravno prema drugom robotu 1 sekundu. Nakon toga šalje poruku drugom robotu da krene s vožnjom unatrag također jednu sekundu. Drugi robot čeka dok ne primi poruku, a zatim vozi unatrag.
Program za prvi robot
Program za drugi robot
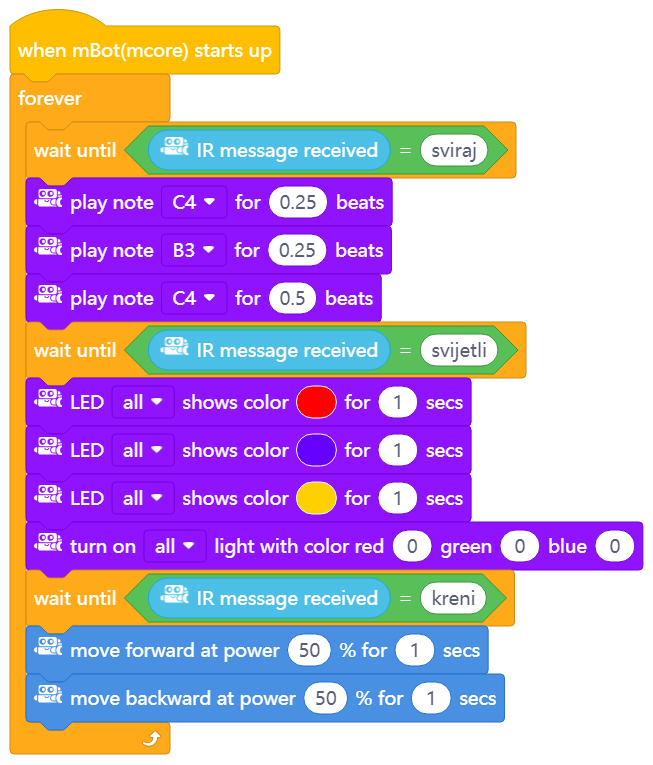
Sviraj, svijelti ili kreni
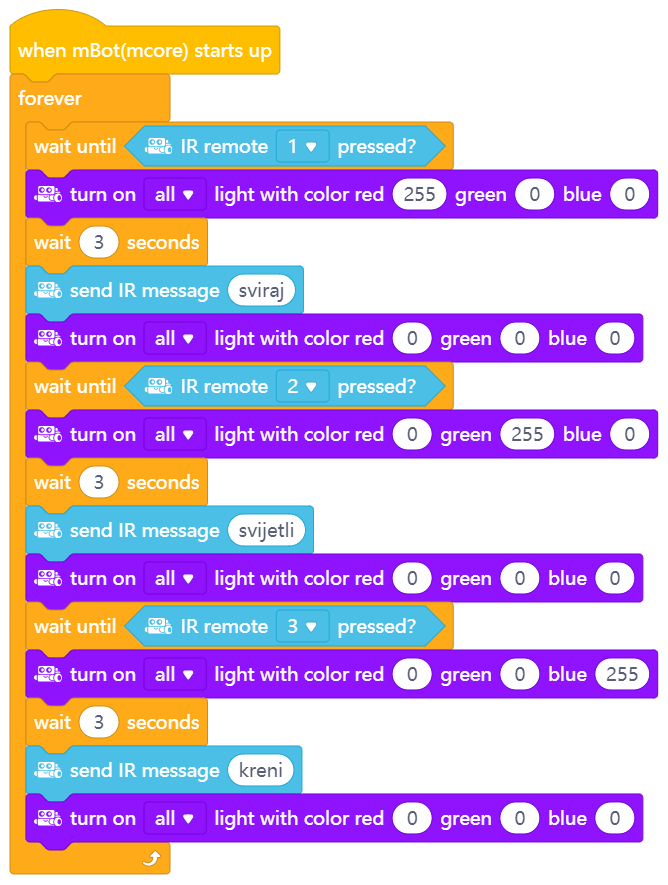
Prvi robot čeka pritisak na jednu od 3 tipke na daljinskom upravljaču. Ako se na daljinskom pritisne tipka 1, robot uključuje crvena svjetla i nakon 3 sekunde šalje poruku drugom robotu da svira te nakon slanja poruke gasi svjetla. Ako se na daljinskom pritisne tipka 2, robot uključuje crvena svjetla i nakon 3 sekunde šalje poruku drugom robotu da svijetli te nakon slanja poruke gasi svjetla. Ako se na daljinskom pritisne tipka 3, robot uključuje crvena svjetla i nakon 3 sekunde šalje poruku drugom robotu da krene te nakon slanja poruke gasi svjetla.
Drugi robot neprestano provjerava koju poruku je primio te ovisno o tome izvršava radnju.
Program za prvi robot
Program za drugi robot