
22 svi Robot oprašivač
OŠ Vladimira Nazora, Daruvar
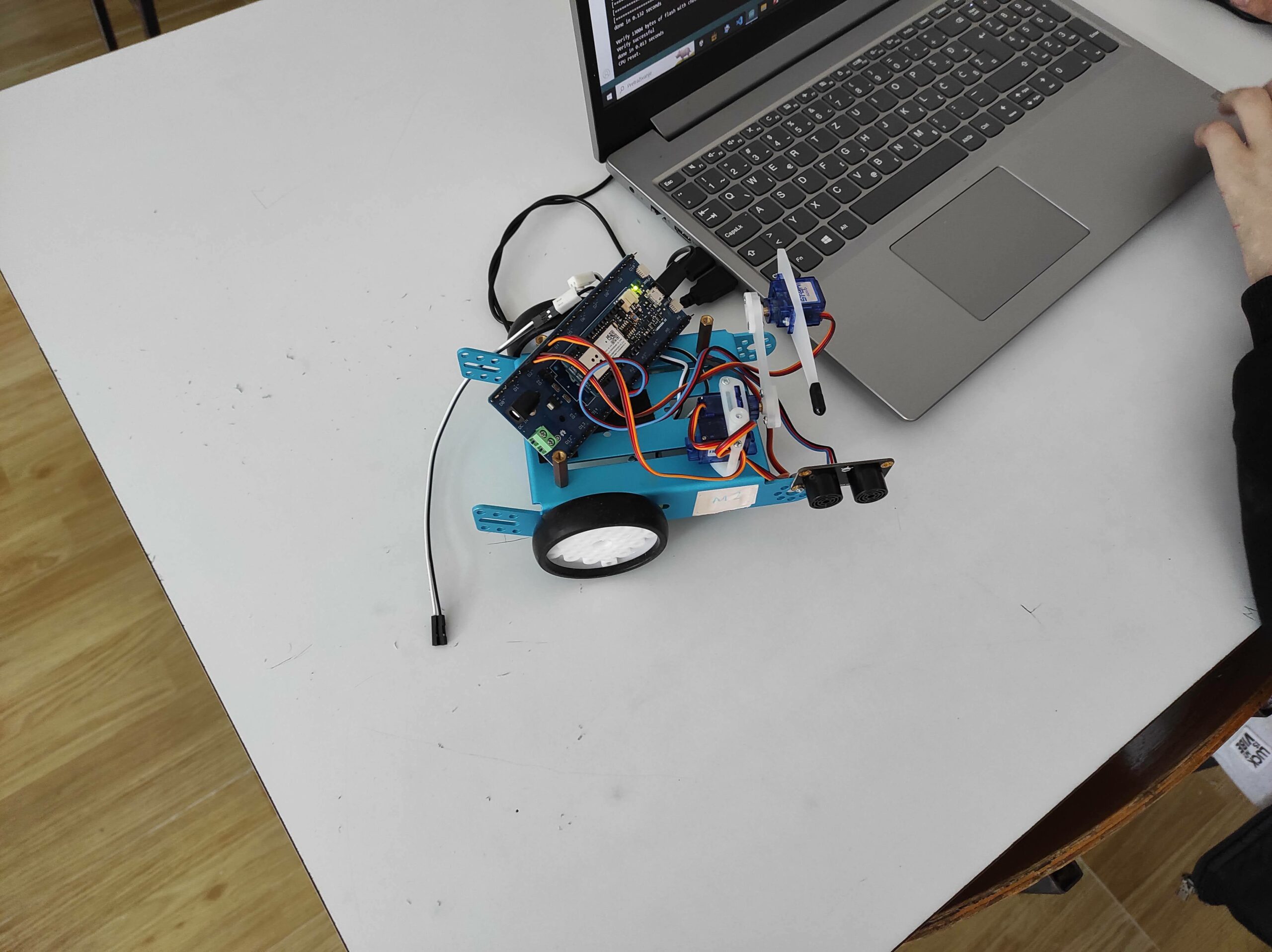
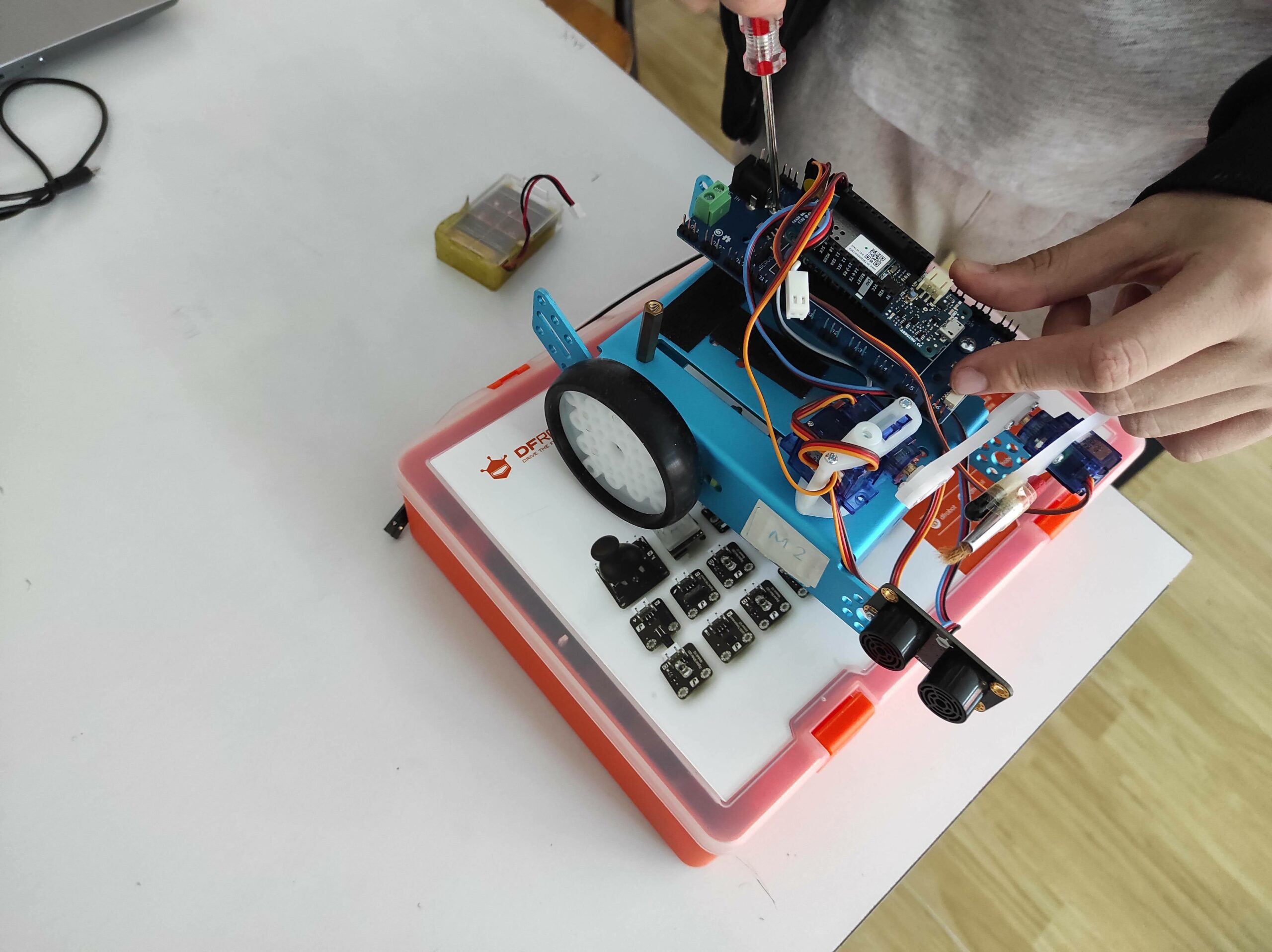
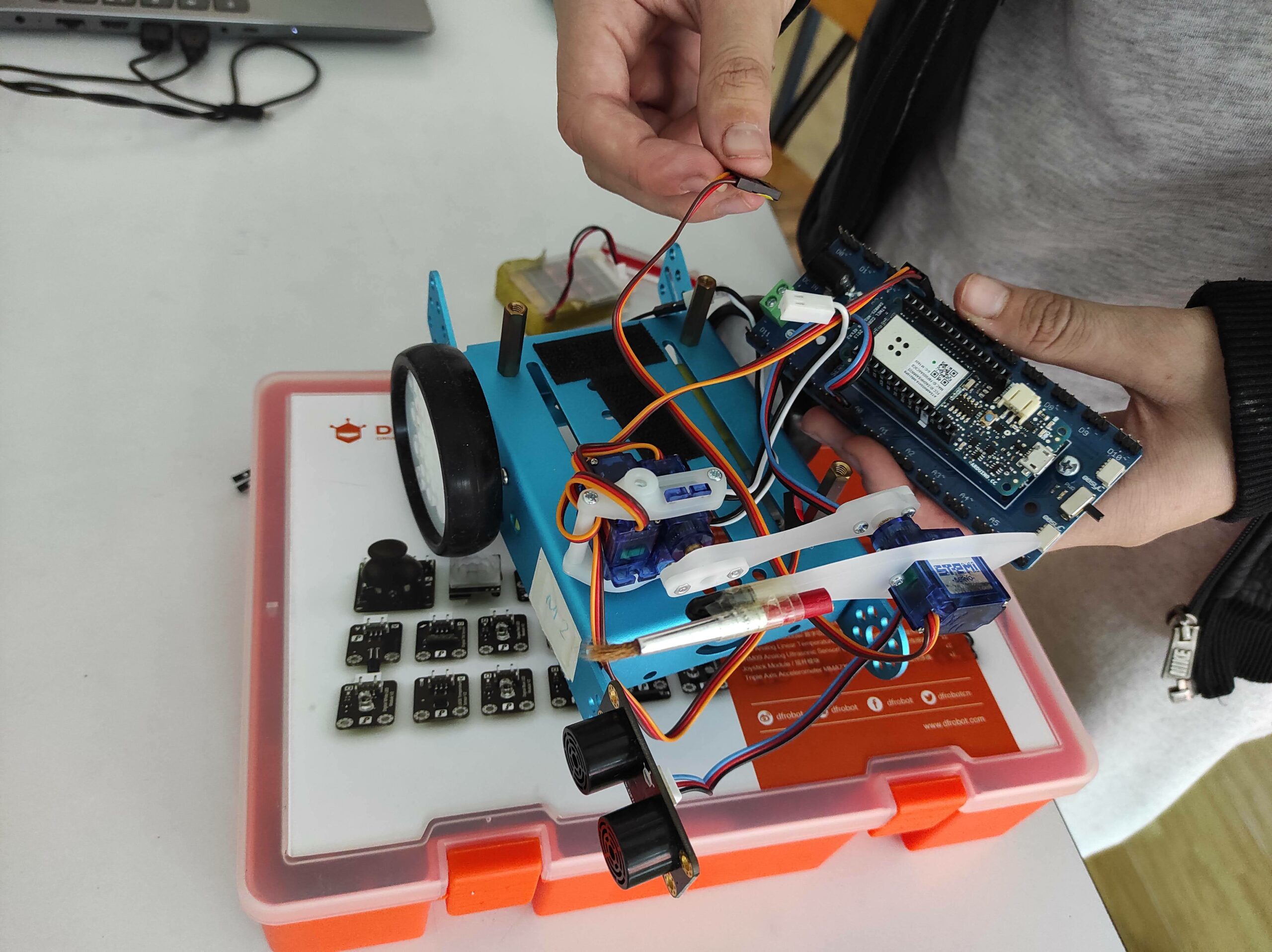
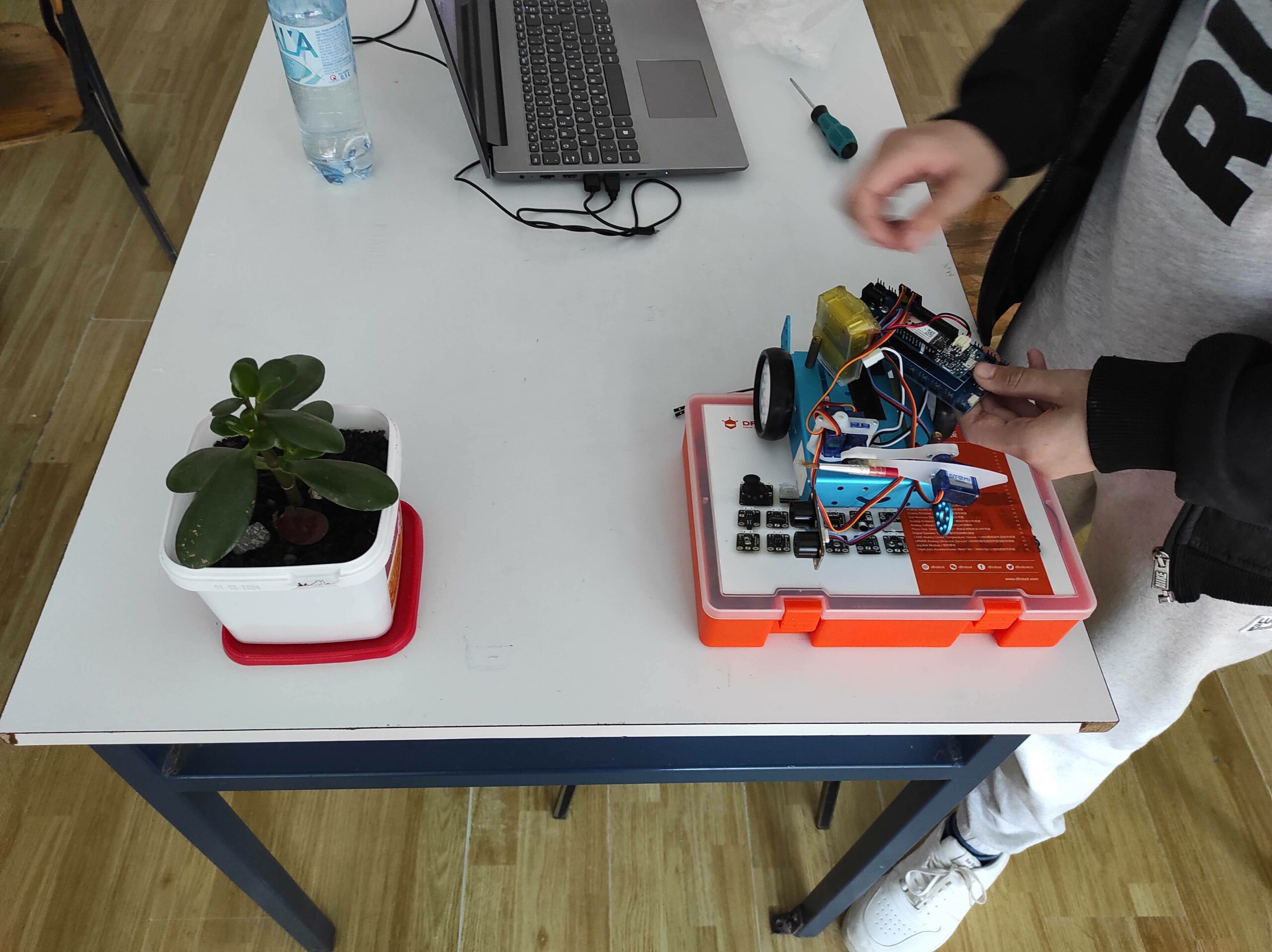
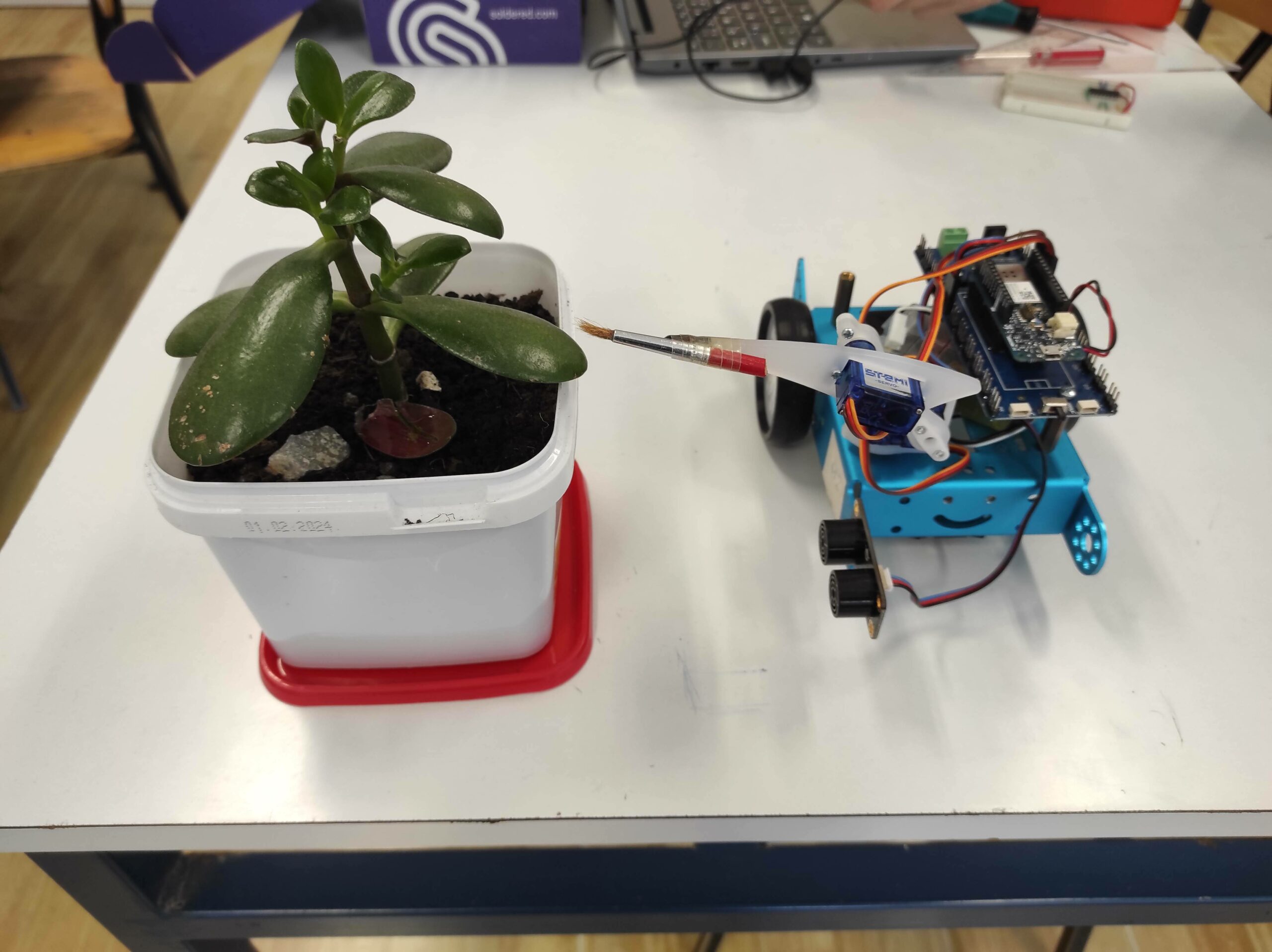
Ovim projektom pokušalo se konstruirati robota koji bi oprašivao biljke u zatvorenim prostorima poput staklenika i plastenika. Ideja je bila da se na mobilnu platformu montiraju senzori i robotska ruka koja bi vršila oprašivanje biljke. Platforma bi se gibala pokraj biljaka te bi se zaustavljala kada bi ultrazvučni senzor detektirao biljku. Na osnovu izmjerene udaljenosti do biljke, sa platforme bi se ispružila robotska ruka i izvršila oprašivanje.
Kao platforma korištena je šasija mBota s kotačima i motorima, robotska ruka na koju je pričvršćen kist je noga heksapoda sa tri servo motora, ultrazvučni senzor je dio Gravity seta, a mikrokontroler je Arduino MKR1000 na pripadnom shieldu. Funkcija mobilne platforme nije do kraja razrađena te nije niti prikazana u konačnoj verziji.
U nekoj budućoj verziji na robotsku ruku bi se dodao i senzor boje te bi se pomoću njega pokušalo otkriti položaj cvijeta na biljci.


Mentor:
Davor Horvatin
Učenici:
Lovro Leben i Josip Machat