01 lip Project Bionica
Krapinski informatički klub KRIK
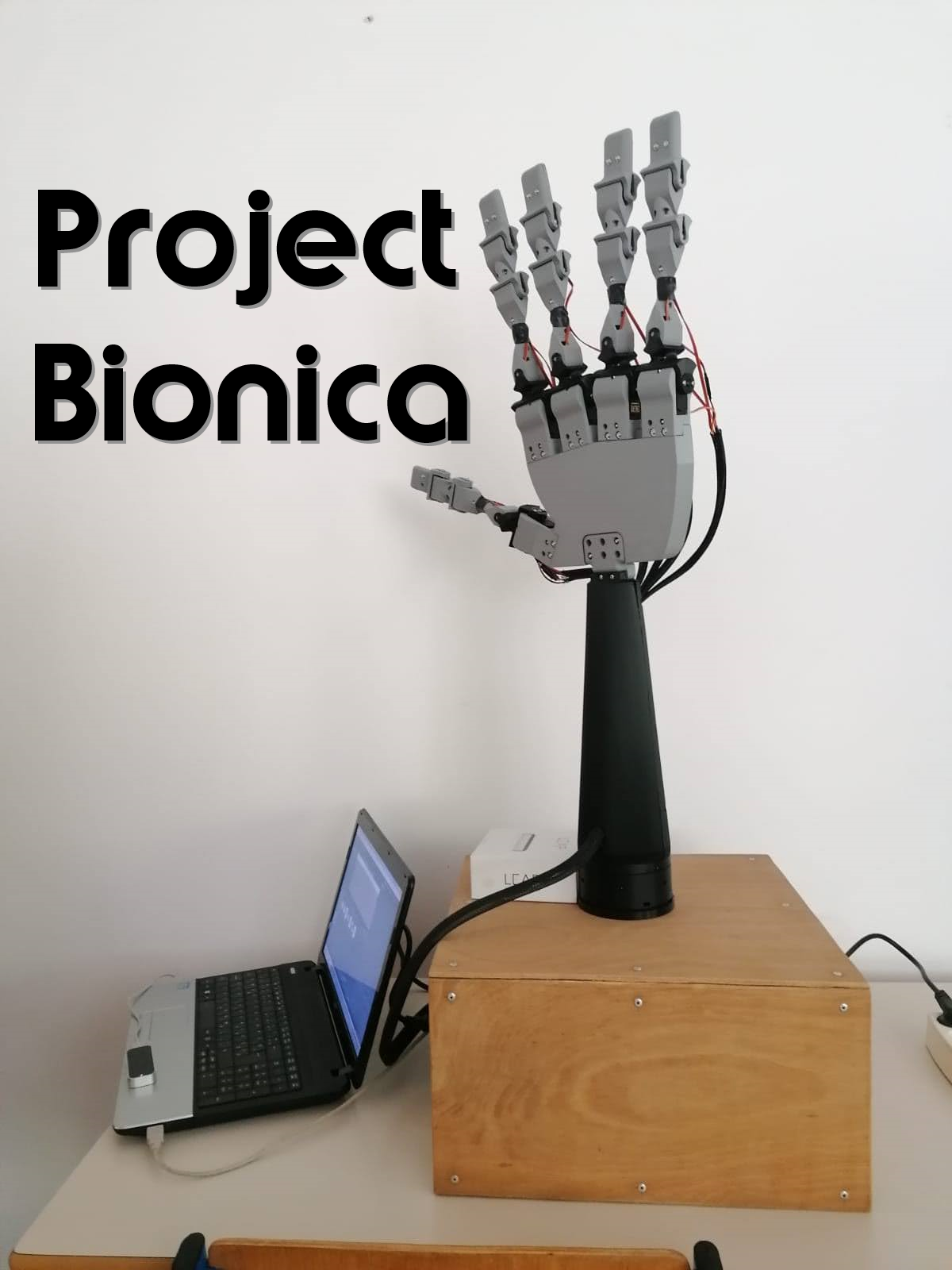
Koristeći Leap Motion senzor i vlastiti softver na računalu prenosimo kretnje ljudske ruke na robotsku ruku. Za izradu modela korištena je Catia. Dijelovi ruke ispisivani su na 3D pisaču. Korišteni su servo motori, koračni motori, harmonijski reduktor, Leap motion senzor i Arduino. Za izradu softvera korišten je Unity i Arduino IDE. Ideja za ovaj projekt potekla nam je iz želje za konstruiranjem sustava robotske ruke kojom se može upravljati beskontaktno. Mehanički dio robotske ruke sastoji se od 20 servo motora koji pomiču dijelove spojene na njih. Svaki servo motor predstavlja jedan zglob u prstu, ali su u nekim slučajevima korištena dva servo motora da dobijemo pomak u dvije osi. Servo motorima upravlja Arduino Mega 2560 smješten u “podlaktičnom dijelu”. Arduino se preko USB kabla spaja na računalo na kojem pokrećemo naš softver za upravljanje. Softver za upravljanje izrađen je u programu Unity. On prima informacije sa senzora te ih provodi kroz algoritam koji nam daje potrebne informacije o kutovima svih zglobova u dlanu. Ovi podaci se nakon obrade prenose na Arduino koji postavlja svaki motor u željeni položaj. Senzor za beskontaktno upravljanje je Leap Motion Sensor. Senzor pomoću infracrvenih kamera prati poziciju ljudske ruke u 3D prostoru iznad njega. Sve informacije dobivene iz senzora šalju se na računalo na koje je povezan, te se proslijeđuju u naš softver. Kombinacijom svih ovih dijelova dobivamo beskontaktno upravljanje robotskom rukom u realnom vremenu.




Mentor:
Stjepan Šalković
Učenici:
Alen Šćuric, Tomislav Martinez, Borna Bakliža, Dominik Presečki