15 velj Vožnja u krug oko svoje osi
Robot se može vrtjeti u krug oko svoje osi. Prije rješavanja zadatka, proučite primjere zakretanja oko centralne osi robota. Uočit ćete da su smjerovi zakretanja motora suprotni, a brzine jednake.
Vožnja u krug oko svoje osi (smjer – udesno)

Nakon pritiska na tipkalo A, robot se zakreće udesno po centralnoj osi 5 sekundi.
Oba motora se kreću u različitom smjeru, jednakom brzinom.
U naredbama za kretanje, lijevi motor je označen argumentom left, smjer kretanja je Forward (unaprijed). Desni motor je označen argumentom right, smjer kretanja je Backward (unazad). Brzina na oba motora je postavljena na 150.
Broj 150 označava brzinu kojom se kotači na robotu okreću. Što je taj broj veći, to se kotač brže okreće. Najveća brzina kojom se kotač može kretati je 255, a ako je brzina 0, kotač miruje. Robot skreće u smjeru onog kotača koji ide unazad.
Vožnja u krug oko svoje osi (smjer – ulijevo)

Nakon pritiska na tipkalo A, robot se zakreće ulijevo po centralnoj osi 5 sekundi.
Oba motora se kreću u različitom smjeru, jednakom brzinom.
U naredbama za kretanje, desni motor je označen argumentom right, smjer kretanja je Forward (unaprijed). Lijevi motor je označen argumentom left, smjer kretanja je Backward (unazad). Brzina na oba motora je postavljena na 150.
Broj 150 označava brzinu kojom se kotači na robotu okreću. Što je taj broj veći, to se kotač brže okreće. Najveća brzina kojom se kotač može kretati je 255, a ako je brzina 0, kotač miruje. Robot skreće u smjeru onog kotača koji ide unazad.
Zadatak
Izradite program kojim će se robot okretati oko sebe (u lijevu stranu) nakon što 2 sekunde vozi ravno. Zakretanje oko svoje osi neka također traje 2 sekunde. Nakon zakretanja robot se mora kratko zaustaviti.
Neka takav slijed naredbi ponavlja beskonačno mnogo puta.
Rješenje
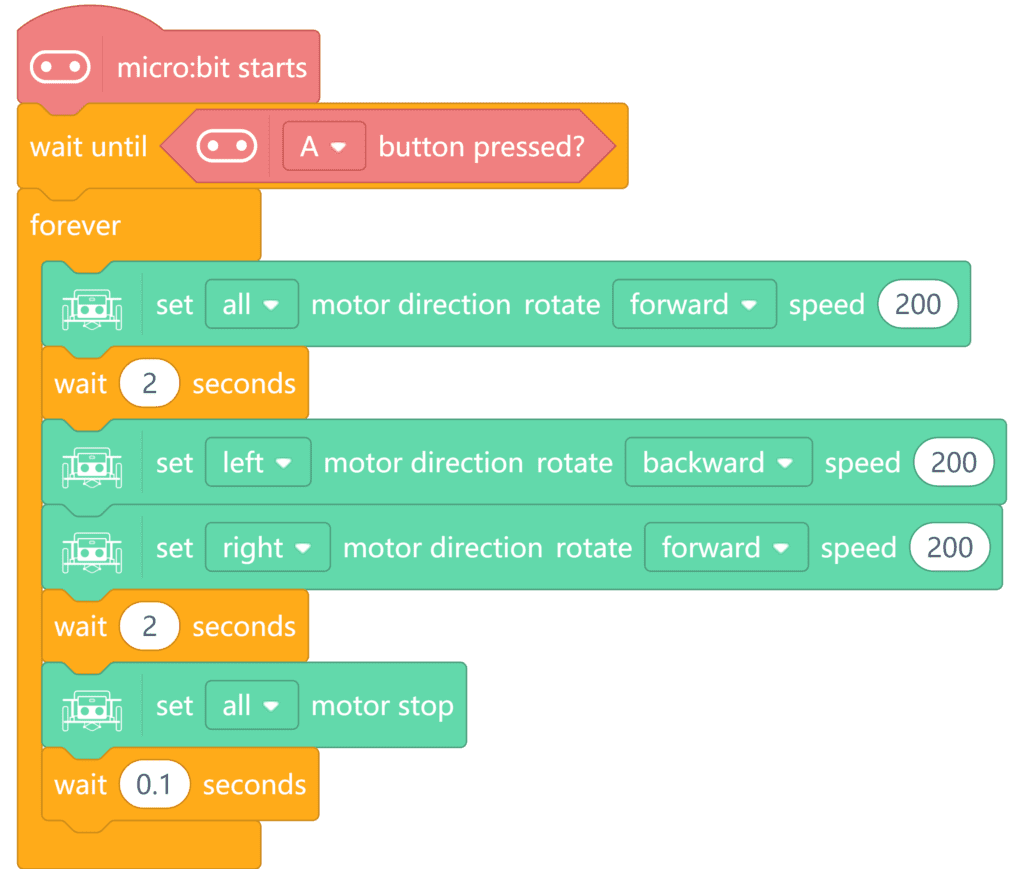
Objašnjenje
Blok u koji ćete stavljati sve naredbe je micro:bit starts iz micro:bit kategorije. U kategoriji Control pronađite naredbu wait until. Kao uvjet postavite A button pressed? iz micro:bit kategorije. Dok taj uvjet nije ispunjen, program stoji.
U kategoriji Control pronađite forever petlju. Uzmite naredbu set left motor direction forward speed 200 i stavite je unutar forever petlje. Umjesto left odaberite all. Nakon toga dodajte pauzu od 2 sekunde naredbom wait 2 seconds iz Control kategorije. Sada se robot vozi ravno 2 sekunde brzinom 200.
Za zakretanje oko svoje osi u lijevu stranu, lijevi motor robota se mora kretati unazad, a desni unaprijed, oba jednakom brzinom. Stoga, dvaput uzmite naredbu set left motor direction forward speed 200 te u drugoj left promijenite u right. Kod naredbe za lijevi motor Forward promijenite u Backward. Nakon toga dodajte pauzu od 2 sekunde (wait 2 seconds).
Za kraj dodajte naredbe set all motor stop i wait 0.1 seconds kako bi se robot zaustavio na 100 milisekundi nakon zakretanja udesno.