13 sij Prepoznavanje objekta
Ovim načinom rada HuskyLens kamera može prepoznati objekt i pratiti ga. Objekti koje može prepoznati su unaprijed definirani i ukupno ih je dvadeset. To su: avion, autobus, automobil, bicikl, brod, motor, vlak, mačka, krava, pas, konj, ptica, ovca, osoba, stol, stolica, biljka u tegli, boca, kauč i televizor.
HuskyLens kamera ne može razlikovati objekte iste kategorije. Na primjer, prepoznati će da je objekt mačka, ali ne može prepoznati koja je vrsta mačke. Za razliku od učenja i prepoznavanja lica u kojem svako novo lice dobiva svoju brojčanu oznaku i biva pohranjeno kao zasebna stavka, u funkciji prepoznavanja objekta ako kamera najprije prepozna i nauči primjerice neku osobu, svaki put kad detektira bilo koju osobu (tu ili neku drugu), prikazat će se ista brojčana oznaka.
Zadana postavka ove funkcije je prepoznavanje jednog objekta, kao i u prethodno opisanim funkcijama kamere, to se u njezinim postavkama može promijeniti uključenjem opcije Learn Multiple.
Odabir načina rada Prepoznavanje objekta
- Uključite kameru (USB kabelom ili preko robota).
- Pomicanjem funkcijskog tipkala u izborniku pronađite funkciju prepoznavanje objekta (Object recognition).
- Dugim pritiskom na tipkalo uđite u njezin izbornik i pomicanjem tipkala pronađite opciju Learn Multiple. Kratkim je pritiskom odaberite.
- Uključite opciju i ponovnim kratkim pritiskom na funkcijsko tipkalo završite ovaj korak. Vratite se do Save&Return i spremite promjenu. Time ste omogućili kameri da nauči više objekata.
Učenje i prepoznavanje objekta
Prilikom prepoznavanja objekata HuskyLens kamera će automatski prepoznati objekt i on će na ekranu biti prikazan unutar bijelog okvira s nazivom.
Slijedite korake za učenje objekata.
- Provjerite je li kamera postavljena na funkciju prepoznavanja objekte te ako nije, funkcijskim tipkalom dođite do nje.
- Usmjerite znak plus prema prvom objektu.
- Kratko pritisnite tipkalo za učenje. Boja okvira prelazi iz bijele u plavu i pojavljuje se naziv objekta i njegov ID1. Na zaslonu će se pojaviti poruka Click again to continue! Click other button to finish. Prije kraja odbrojavanja kratko pritisnite tipkalo za učenje kako biste mogli ponoviti postupak učenja drugog objekta.
- Usmjerite sada kameru prema drugom objektu i ponovite postupak učenja (korak 3).
- Nakon toga ponovite postupak učenja i posljednjeg objekta, ali na kraju dozvolite da odbrojavanje završi ili ga završite pritiskom na funkcijsko tipkalo.
Kada kamerom naiđete na naučene objekte, oni će biti uokvireni okvirom u boji te će se za svaki od njih prikazati ime i brojčana oznaka. Prilikom susreta s novim objektima oni će biti uokvireni bijelim okvirom.
Brojčana oznaka (ID) broj je povezan s redoslijedom učenja objekata. Ako je primjerice avion naučen kao prvi, a autobus kao drugi objekt, tada će prilikom prepoznavanja aviona pisati airplane:ID1, a prilikom prepoznavanja mačke bus:ID2.
Ovdje su izdvojena tri objekta za korištenje u ovom primjeru programa. Osim fotografija, možete koristiti i objekte iz svog okruženja (pod uvjetom da pripadaju jednoj od dvadeset kategorija objekata koje kamera može prepoznati i naučiti).

Zamislite da možete pretvoriti robot u asistenta za uređenje novog prostora u koji radnici unose namještaj. S obzirom na to da im je prostor nov i nepoznat, robot im može dati informaciju kamo moraju ići da odlože namještaj. Robot će kamerom snimiti komad namještaja, a na zaslonu micro:bita će se na dvije sekunde prikazati smjer u kojem radnik treba ići.
Izradite program kojim će se na zaslonu micro:bita prikazati strelica za lijevo, desno ili ravno, u ovisnosti o tome koji objekt kamera prepozna.
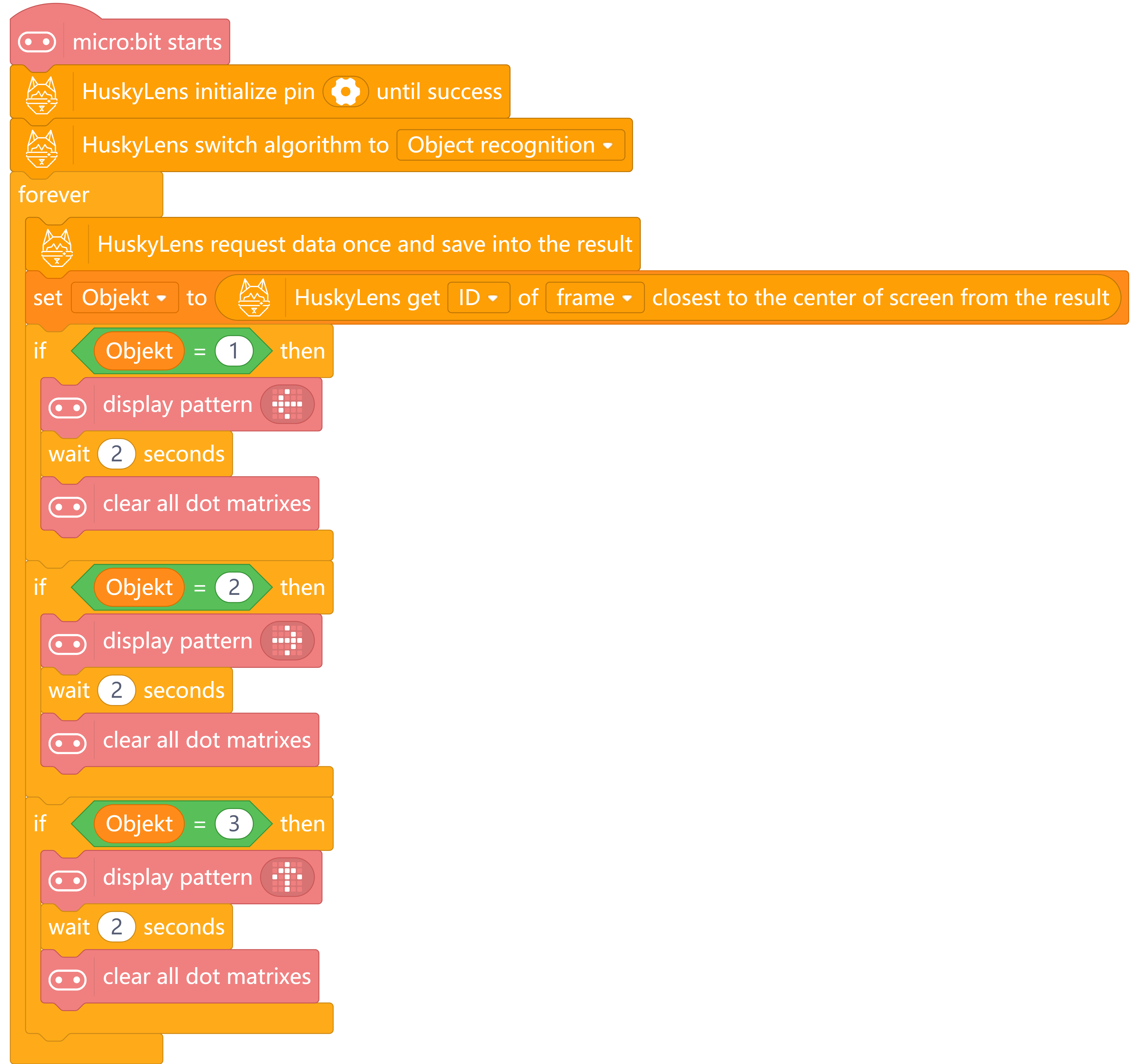
Prije glavnog dijela programa, na početku, nalazi se naredba za inicijalizaciju kamere i naredba kojom je određeno da je kamera u funkciji prepoznavanja objekta.
U forever petlji se neprestano prati koji objekt kamera registrira te informaciju o tome pohranjuje u varijablu Objekt (potrebno ju je kreirati u kategoriji Variables), a zatim se ovisno o brojčanoj oznaci objekta prikazuju strelice na zaslonu micro:bita.
U novom primjeru kamerom zapamtite nova dva objekta, mačku i psa.
Ako se kamera trenutno ne nalazi u funkciji prepoznavanja objekata i/ili nije u načinu rada za učenje, odaberite najprije funkcijskim tipkalom prepoznavanje objekata, a zatim kratkim pritiskom na tipkalo za učenje, izbrišite prethodno naučene objekte.
Naučite kameru nove objekte (najprije psa, a onda mačku kako biste imali istu brojčanu oznaku za navedene objekte kao što je i u ovom primjeru programa).
Izradite program kojim će robot životinjama dati pristup hrani. Kada kamerom prepozna životinju, neka se pomakne unazad na 5 sekundi za psa te 3 sekunde za mačku te neka uključi svjetleće diode kao znak da je hranjenje u tijeku.
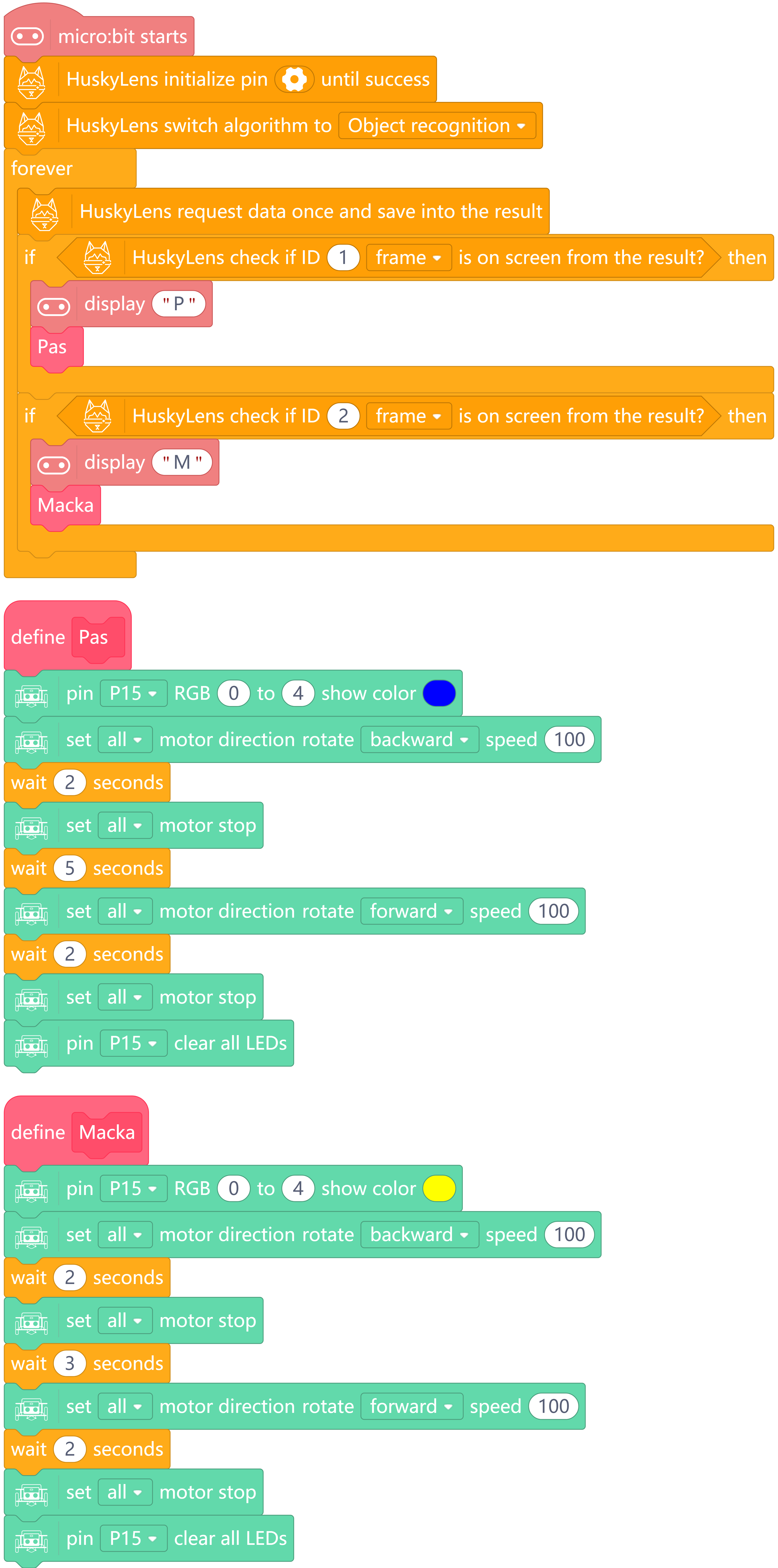
U posebnim blokovima naredbi Pas i Macka koji se izrađuju preko kategorije My Blocks odabirom opcije Make a Block, nalaze se naredbe za uključenje svjetlećih dioda (plava za psa i žuta za mačku) te naredbe za vožnju unatrag i vraćanje prema naprijed nakon što istekne zadano vrijeme (5 sekundi za psa i 3 sekunde za mačku). Vrijeme i brzinu za vožnju možete zadati sami. Ti se blokovi koriste u glavnom dijelu programa, a izrađeni su posebno radi preglednosti.
U glavnom djelu programa, nakon inicijalizacije i određivanja načina rada kamere, micro:bit provjerava detektira li robot kamerom psa ili mačku preko njihovih brojčanih vrijednosti.
Ako prepozna psa (kojeg je prvo naučio i ima brojčanu oznaku jednaku jedan), na zaslonu micro:bita će se ispisati slovo P i izvršiti blok naredbe Pas.
Za prepoznavanje mačke (brojčana oznaka jednaka dva) će se na zaslonu micro:bita prikazati slovo M i izvršiti blok naredbe Macka.
Sadržaj materijala isključiva je odgovornost Instituta za razvoj i inovativnost mladih.

Projekt je 85% financiran iz EGP financijskog mehanizma, a 15% financiran iz državnog proračuna.