13 lip Praćenje linije s vanjske strane
Za rješavanje ovog zadatka upotrijebite stazu koju ste dobili u kompletu s robotom ili izradite svoju stazu. Svoju stazu možete kreirati od modularnih dijelova koje možete preuzeti ovdje. Isprintajte dijelove staze u količinama koje vam trebaju na papiru veličine A4 te ih spojite po želji. Stazu možete načiniti i na svjetlijoj kartonskoj podlozi ili podu na koji ćete zalijepiti crnu izolir traku ili crni kolaž papir.
Zadatak
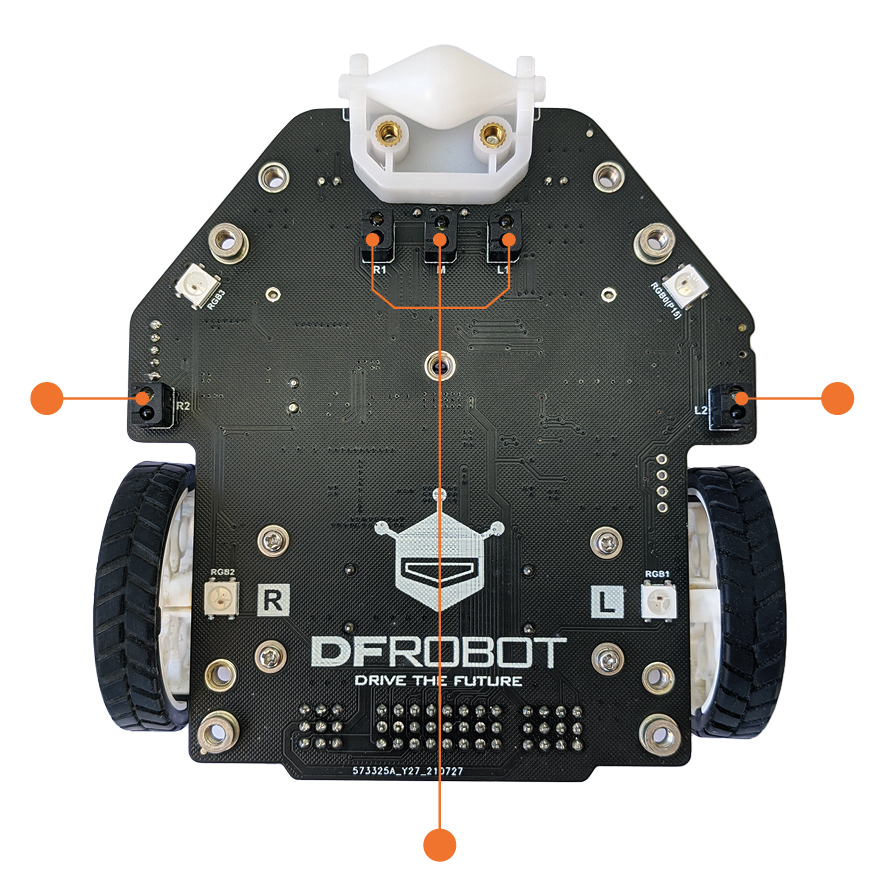
Izradite program pomoću kojeg će robot pratiti crnu crtu s lijeve (vanjske) strane. To znači da je lijevi senzor (L1) za praćenje linije na svijetloj podlozi, a srednji (M) na tamnoj te da se u tom slučaju robot treba kretati ravno.
Rješenje
Objašnjenje
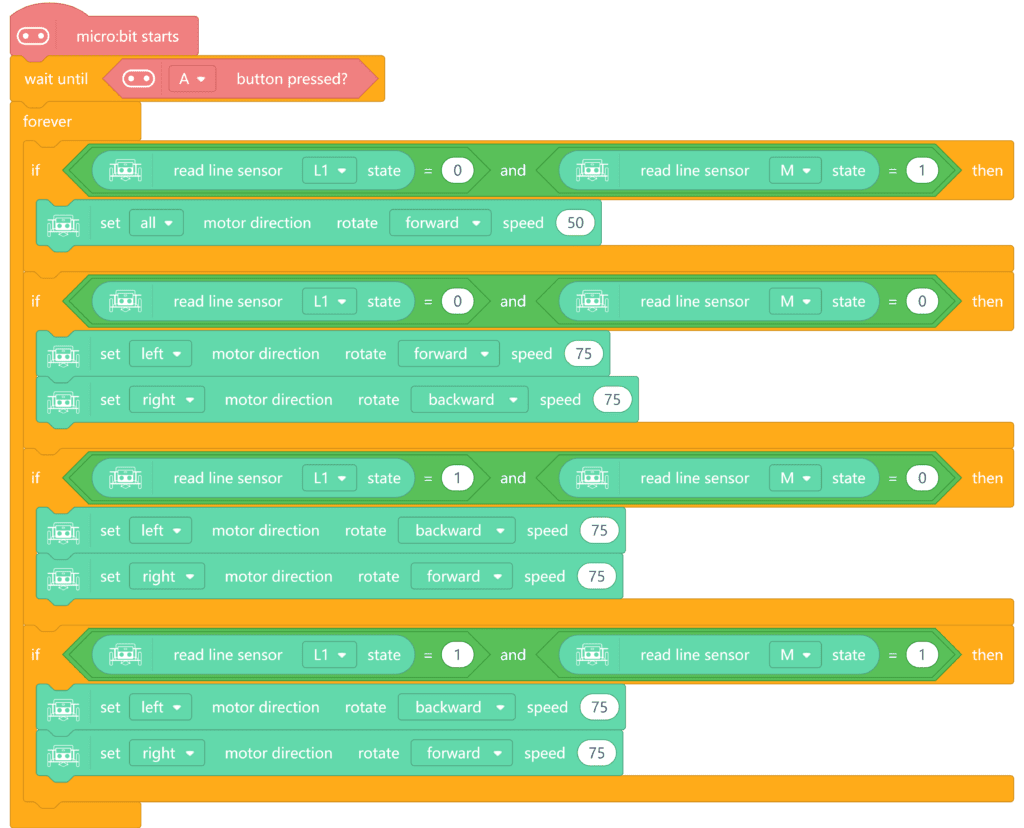
Robot kreće s vožnjom nakon pritiska na tipku A na micro:bitu.
Zatim slijede 4 if then bloka koji provjeravaju 4 moguća očitanja senzora za praćenje linije te ovisno o njima određuju smjer kretanja robota.
Ako je senzor L1 na svijetloj podlozi i senzor M na tamnoj podlozi (if read line sensor L1 state =0 and read line sensor M state =1) robot se kreće ravno (set all motor direction rotate forward speed 50).
Ako su oba senzora na svijetloj podlozi (if read line sensor L1 state =0 and read line sensor M state =0), robot skretanjem u desno traži tamnu podlogu kako bi došao u situaciju da vrijednost senzora M bude 1 i da robot nastavi s vožnjom naprijed.
U situacijama kad je robot s L1 senzorom na tamnoj, a s M senzorom na svijetloj podlozi (if read line sensor L1 state =1 and read line sensor M state =0) ili s oba senzora na tamnoj podlozi (if read line sensor L1 state =1 and read line sensor M state =1), robot skretanjem ulijevo dolazi do položaja iz prve situacije gdje se kreće ravno.