18 tra Praćenje bijele linije na crnoj podlozi iznutra
Zadatak
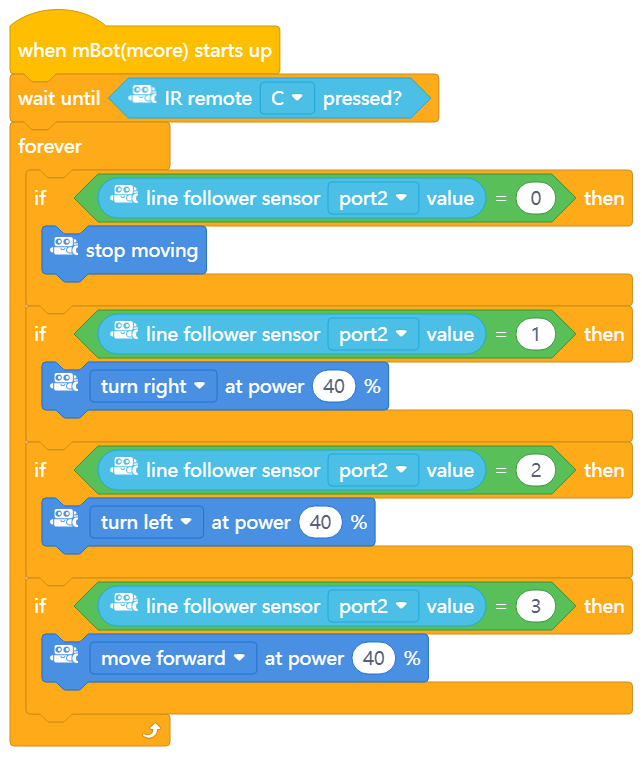
Izradite program kojim će se mBot kretati po svijetloj liniji po sredini kada su oba senzora za praćenje linije na samoj liniji.
Rješenje
Objašnjenje
Robot započinje s kretanjem pritiskom na tipku C na daljinskom upravljaču (wait until IR remote C pressed). Ako senzor za praćenje linije ima vrijednost 0, to znači da je s oba senzora izašao sa svijetle linije te se u ovom primjeru robot zaustavlja. Kada s lijevim senzorom robot izađe na tamnu podlogu, a s desnim ostaje na svijetloj (vrijednost 1), robot skreće desno. U situaciji kad je s desnim senzorom na tamnoj podlozi, a s lijevim na liniji, skreće lijevo (vrijednost 2). Ako su oba senzora na svijetloj podlozi (vrijednost 3), robot vozi ravno.