
14 srp Naredbe za programiranje micro:Maqueen Lite robota
Za programiranje micro:Maqueen Lite robota potrebno je u MakeCode Editor dodati ekstenzije s naredbama za njegovo kretanje, praćenje linije, detektiranje prepreka, uključivanje i isključivanje svjetlećih dioda i drugo.
Pratite izdvojene korake i dodajte potrebne ekstenzije.
1. korak
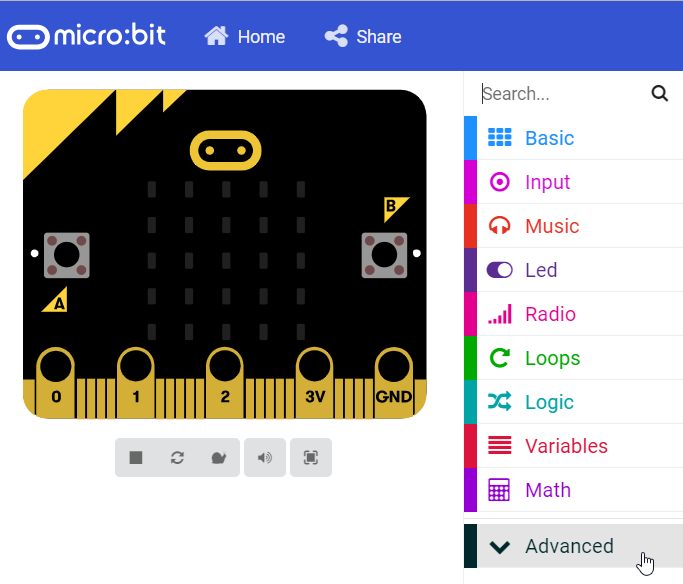
Najprije pokrenite MakeCode Editor.
Nakon što otvorite novi projekt u MakeCode Editoru, u dijelu s kategorijama naredbi odaberite Advanced.
2. korak
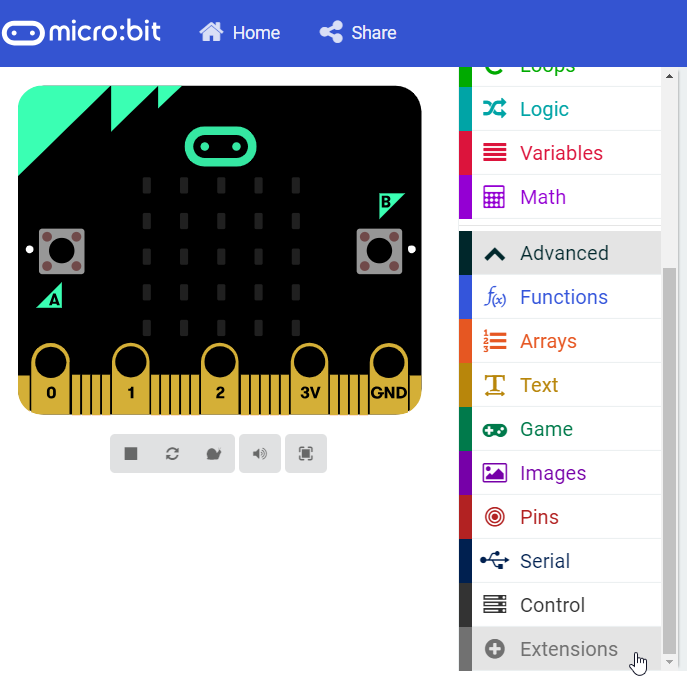
Pritiskom na Advanced otvara se popis s dodatnim kategorijama. Na kraju tog popisa nalazi se opcija Extensions. Pritisnite na nju.
3. korak
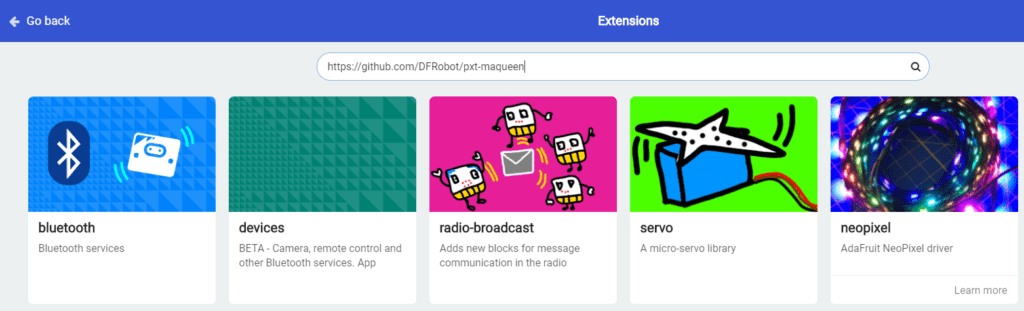
Pritiskom na Extensions otvara se prozor preko kojeg možete pronaći potrebnu ekstenziju. U tražilicu unesite ovu poveznicu https://github.com/DFRobot/pxt-maqueen i pritisnite enter.
4. korak
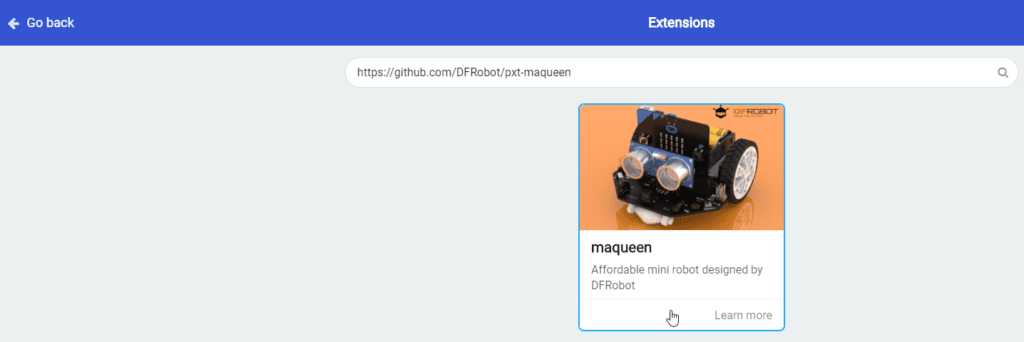
U prozoru će se nakon toga pokazati potreba ekstenzija. Odaberite ju.
5. korak
Tim odabirom ćete se vratiti u editor za programiranje te ćete u popisu kategorija pronaći dvije nove kategorije Maqueen i MaqueenIR. U kategoriji Maqueen se nalaze naredbe koje su vam potrebne za programiranje rada robota.
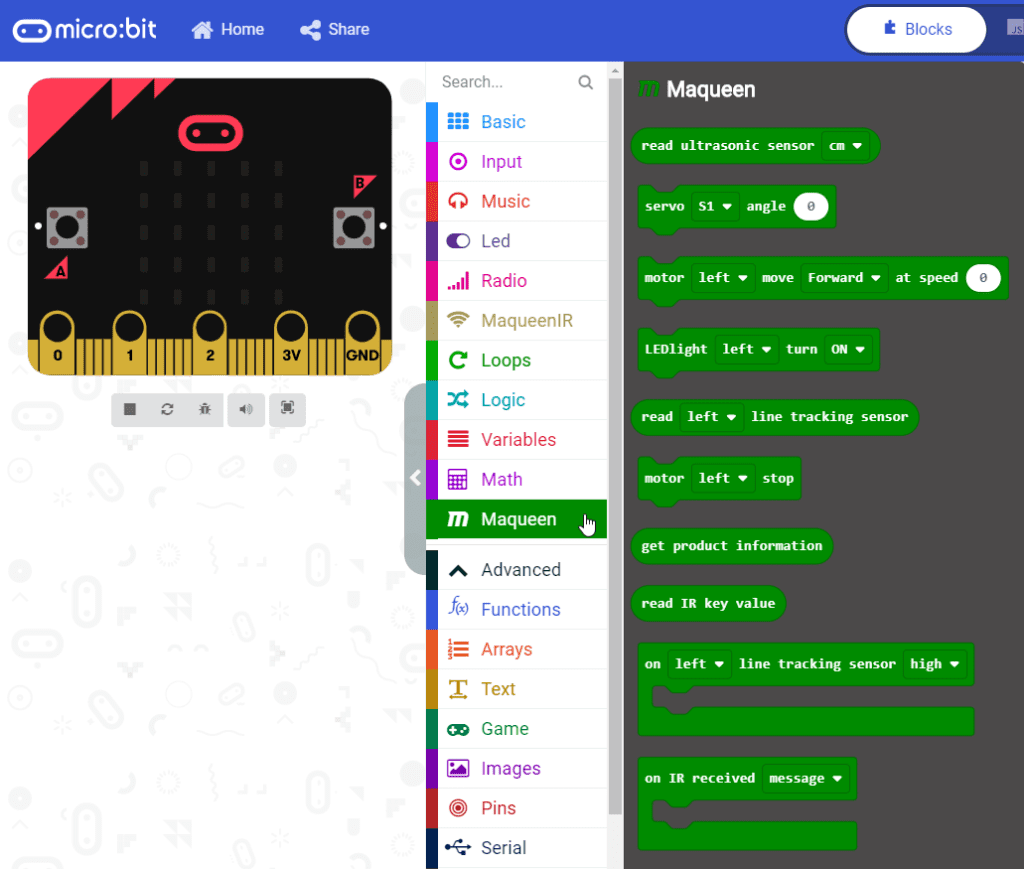
Naredba
Objašnjenje
Naredba u programu javlja vrijednost koju očitava ultrazvučni senzor, a to je udaljenost robota od predmeta koji se nalazi ispred njega.

Naredba koja kontrolira rad motora koji pokreću robot.
Prvi argument naredbe označava na koji motor se odnosi – lijevi, desni ili oba.
Drugi argument naredbe se odnosi na smjer kretanja robota.
Treći argument naredbe je brzina kretanja. Vrijednost se kreće od 0 do 255.
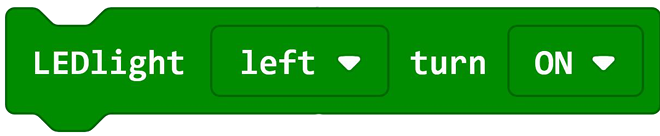
Naredba za uključivanje i isključivanje crvenih svjetlećih dioda na prednjoj strani robota.
Prvi argument označava svjetleću diodu (lijevu ili desnu).
Drugi argument je ON/OFF i njime se određuje hoće li označena svjetleća diode biti uključena ili isključena.

Naredba u programu javlja vrijednost koju očitava senzor za praćenje linije. Ako je senzor na crnoj podlozi, ta vrijednost će biti 0, a ako je na bijeloj podlozi bit će 1.
Argument left/right označava na koji senzor se naredba odnosi.

Naredba za zaustavljanje rada motora.
Argument left/right/all označava motor na koji se naredba odnosi.

Naredba koja prati stanje senzora za praćenje linije.
Prvi argument naredbe (left/right) se odnosi na senzor.
Drugi argument naredbe (high/low) se odnosi na stanje senzora. Kad je senzor na bijeloj podlozi, stanje mu je high. Kad je crnoj podlozi, onda je stanje low.
Možete primijetiti da u navedenim naredbama nedostaju one kojima se kontrolira rad RGB svjetlećih dioda. Te se naredbe nalaze u ekstenziji Neopixel koju je potrebno dodati kao i ekstenziju Maqueen.
U nastavku je uputa za dodavanje Neopixel kategorije naredbi.
1. korak
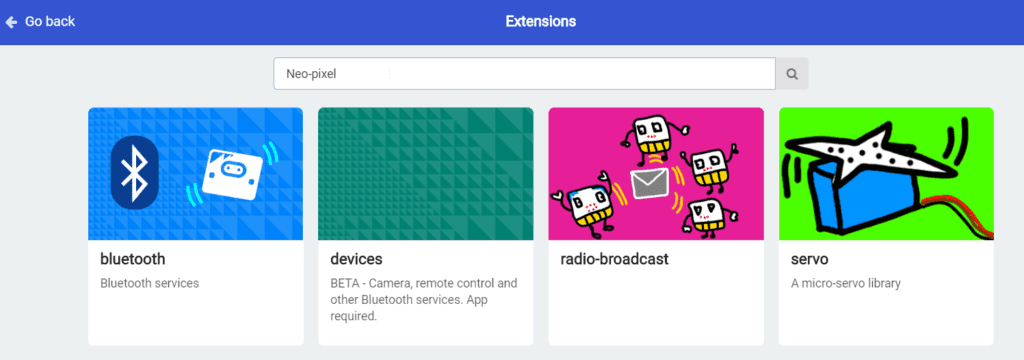
Kliknite na Advanced da dođete do ekstenzija. Pritiskom na Extensions otvara se prozor preko kojeg možete pronaći potrebnu ekstenziju. U tražilicu upišite Neo-pixel i pritisnite enter.
2. korak
U prozoru će se nakon toga pokazati popis ekstenzija koje odgovaraju upisanoj riječi u tražilici. Odaberite prvi ekstenziju kao što je prikazano na slici.
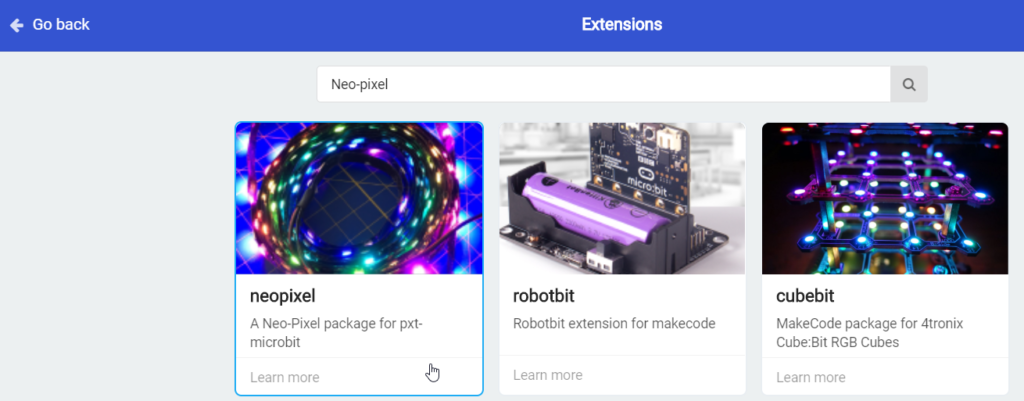
3. korak
Tim odabirom ćete se vratiti u editor za programiranje te ćete u popisu kategorija pronaći dodanu kategoriju Neopixel. U toj kategoriji nalaze se naredbe za programiranje RGB svjetlećih dioda robota.
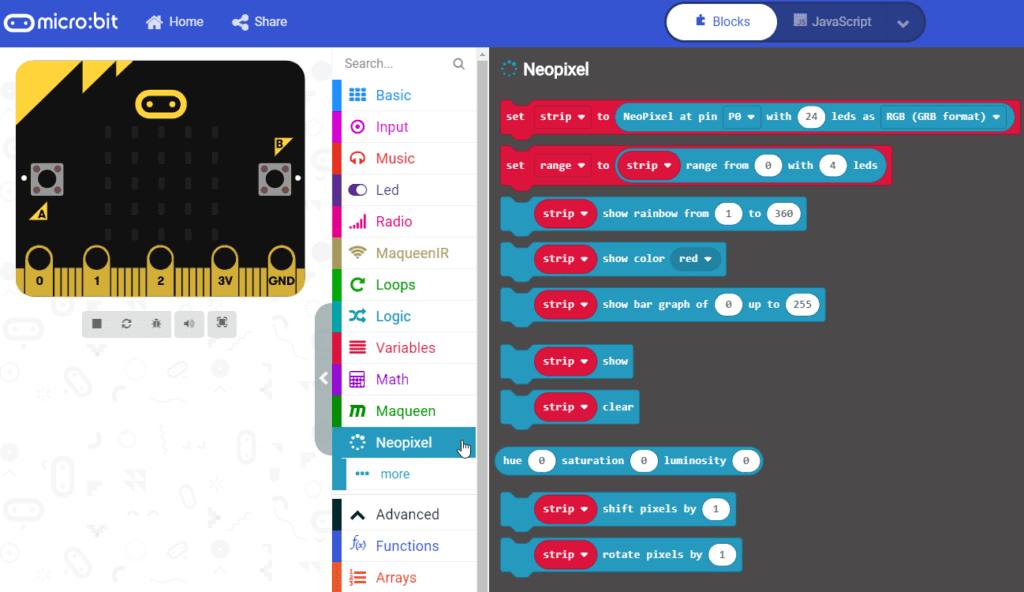
Neopixel kategorija sadrži više naredbi, no u nastavku su izdvojene dvije osnovne naredbe.
Inicijalizacija RGB dioda u programu

Ovu naredbu je potrebno postaviti na početku programa kako bi se RGB svjetleće diode s donje strane robota mogle uključivati i isključivati.
Prvi argument strip je varijabla koja se odnosi na svjetleće diode.
Drugi argument je potrebno postaviti na P15 jer se preko tog izvoda na micro:bitu upravlja radom RGB svjetlećih dioda.
U treći argument upišite broj 4 jer je toliko RGB svjetlećih dioda na robotu.
Posljednji argument se odnosi na format načina rada koji ostavite na GRB opciji.
Odabir boje

Naredba kojom se odabire boja kojom će svijetliti svjetleće diode.