13 lip Križanje – vanjski senzori
Za rješavanje ovog zadatka upotrijebite stazu koju ste dobili u kompletu s robotom ili izradite svoju stazu. Svoju stazu možete kreirati od modularnih dijelova koje možete preuzeti ovdje. U ovom zadatku trebat ćete križanje na stazi. Isprintajte dijelove staze u količinama koje vam trebaju na papiru veličine A4 te ih spojite po želji. Stazu možete načiniti i na svjetlijoj kartonskoj podlozi ili podu na koji ćete zalijepiti crnu izolir traku ili crni kolaž papir.
Zadatak
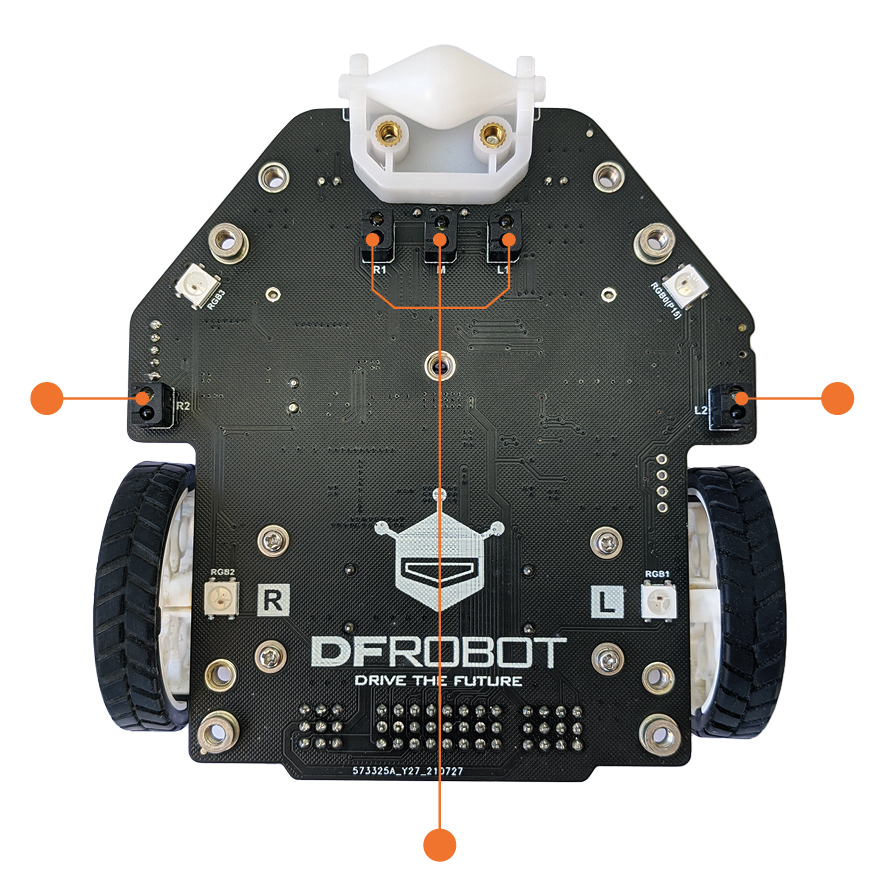
Neka robot prati crnu crtu unutarnjim senzorima L1 i M dok desnim vanjskim senzorom R2 ne pronađe crnu crtu, odnosno križanje. Tada neka skrene desno. Ako su oba unutarnja senzora na bijeloj podlozi, kraj je puta i neka se robot okrene ulijevo i nastavi pratiti crnu crtu.
Rješenje
Objašnjenje
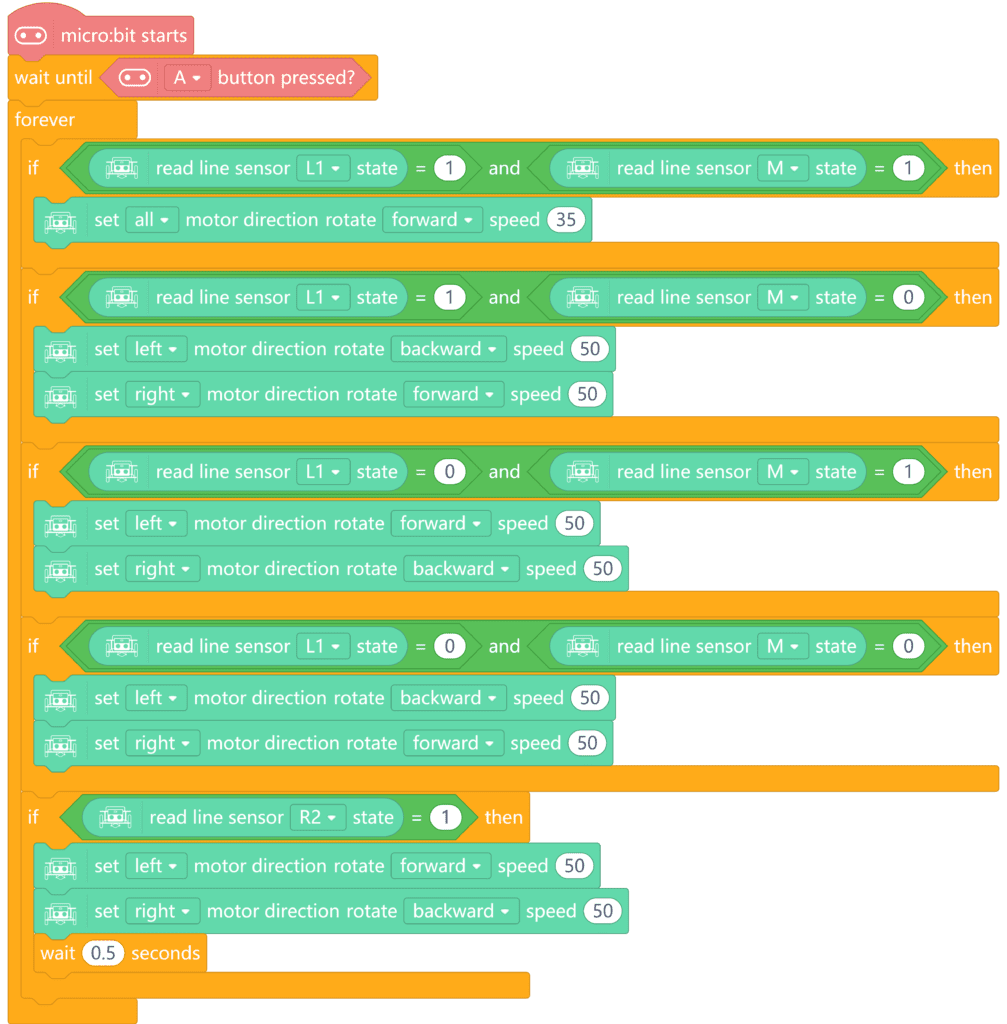
Robot kreće s vožnjom nakon pritiska na tipku A na micro:bitu.
Zatim slijede 5 if then bloka koji provjeravaju očitanja senzora za praćenje linije te ovisno o njima određuju smjer kretanja robota.
U prva 3 uvjeta robot prati liniju s unutarnje strane, na isti način kako je opisano u primjeru Praćenje linije s unutarnje strane.
U četvrtom uvjetu, kada su oba senzora L1 i M na tamnoj podlozi (if read line sensor L1 state =1 and read line sensor M state =1) robot skretanjem ulijevo ponovno nalazi liniju i nastavlja vožnju.
U zadnjem uvjetu provjerava se je li vanjski senzor R2 na tamnoj podlozi (if read line sensor R2 state =1). U tom slučaju robot skreće udesno. Kako bi robot ispravno izvršio skretanje udesno, potrebno je staviti kratku pauzu od pola sekunde da se u tih pola sekunde ne provjeravaju ostali uvjeti.