19 tra Kretanje robota
mBot ima dva motora koja pokreću njegove kotače i time omogućuju gibanje robota.
Robot se može kretati prema naprijed i unatrag te se može zakretati lijevo i desno. Programiranjem svakog motora zasebno može se omogućiti robotu da se kreće kružno.
Osim načina kretanja, potrebno je odrediti i brzinu i vrijeme kretanja. Brzina kretanja robota zadaje se snagom motora koja je izražena u postocima, a ovisi i o istrošenosti baterija koje robot koristi za napajanje.

Naredbe za kretanje nalaze se u mBlock programu pod kategorijom Action.
Naredba
Objašnjenje

Kretanje prema naprijed navedenom snagom u zadanom vremenskom intervalu.

Kretanje unatrag navedenom snagom u zadanom vremenskom intervalu.

Zaketanje ulijevo navedenom snagom u zadanom vremenskom intervalu.

Zakretanje udesno navedenom snagom u zadanom vremenskom intervalu.

Kretanje u odabranom smjeru navedenom snagom.

Naredba za programiranje svakog motora zasebno čime se postiže da se kotači okreću različitim brzinama.

Zaustavlja kretanje.
Savjet: Prilikom izrade programa kojima se robot kreće dobro je postaviti na početku naredbu da robot krene s vožnjom pritiskom na tipkalo ili putem daljinskog upravljača. U suprotnom će robot krenuti s vožnjom odmah nakon prenošenja programa s računala, što može rezultirati time da robot padne sa stola i ošteti se.
Ovisno o stanju baterija i željenoj duljini puta koju robot treba prijeći, vrijednosti vremena i brzine skretanja su relativne te ih je potrebno prilagoditi.
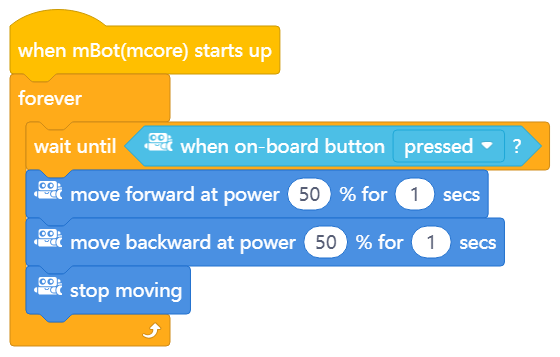
Kretanje naprijed-nazad
Pritiskom na tipkalo, robot se kreće prema naprijed 1 sekundu zatim unazad 1 sekundu te se onda zaustavlja.
Kretanje je isprogramirano na dva različita načina.
U prvom primjeru koriste se naredbe move forward at power 50% for 1 secs za kretanje naprijed i move backward at power 50% for 1 secs za kretanje unazad. Naredbom stop moving robot staje.
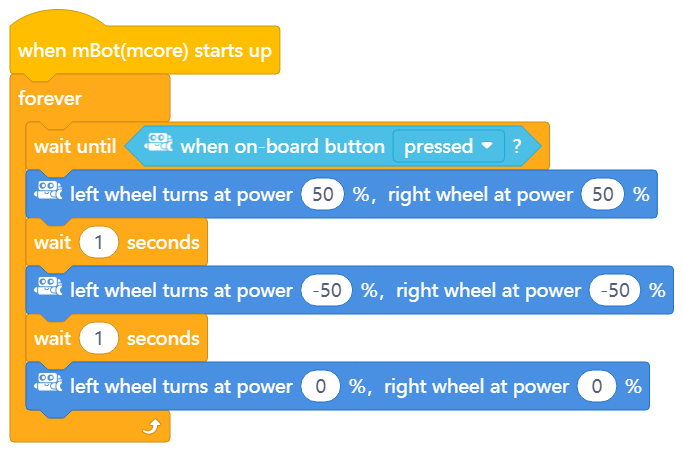
U drugom primjeru koriste se naredbe kojima se oba kotača prvo okreću prema naprijed (left wheel turns at power 50%, right wheel at power 50%) te zatim unazad jer su obje vrijednosti snage motora negativne (left wheel turns at power -50%, right wheel at power -50%). Kada su vrijednosti snage motora oba kotača jednake 0, robot se zaustavlja (left wheel turns at power 0%, right wheel at power 0%).
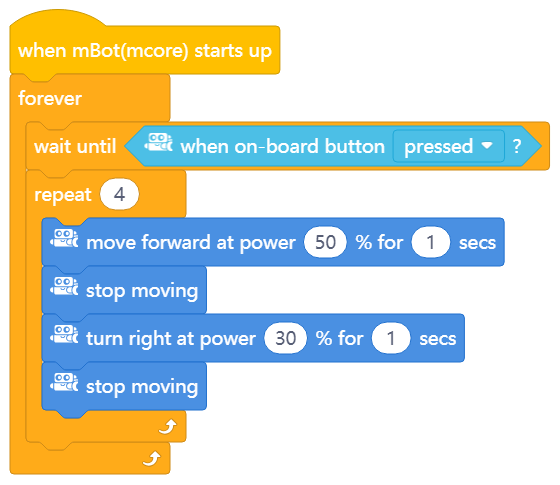
Kretanje u obliku kvadrata
Robot kreće pritiskom na tipkalo. Repeat petljom 4 puta se ponavljaju naredbe za kretanje unaprijed (move forward at power 50% for 1 secs) i skretnje udesno (turn rught at power 30% for 1 secs). Na ovaj način robot se kreće u obliku kvadrata.