09 ožu Izrada prvog programa
Nakon što ste povezali robot s računalom spremni ste za izradu prvog jednostavnog programa za kretanje robota. Mi smo najprije sastavili Robotic Arm Tank robota te su primjeri programa na ovoj stranici programirani i isprobani upravo na njemu.
Program za kretanje robota naprijed-natrag
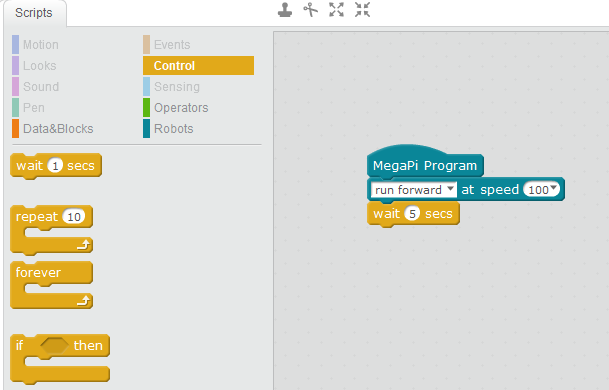
U gornjem lijevom kutu nalaze se kategorije iz kojih se odabiru naredbe. Nisu sve kategorije dostupne za ovu vrstu robota. Koristiti se mogu: Data&Blocks (za definiranje blokova i varijabli), Control (definiranje vremena, uvjeta i petlji), Operators (matematički, logički i drugi operatori) i Robots (pokretanje robota i njegovih dijelova).
Izradimo jednostavan program za robota tako da se robot kreće naprijed u trajanju od 5 sekundi, zatim da se kreće natrag jednako dugo te stane.
Iz kategorije Robots dovucite MegaPi blok u prostor za programiranje.
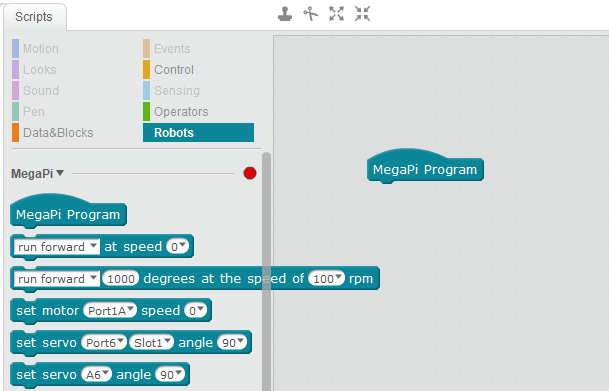
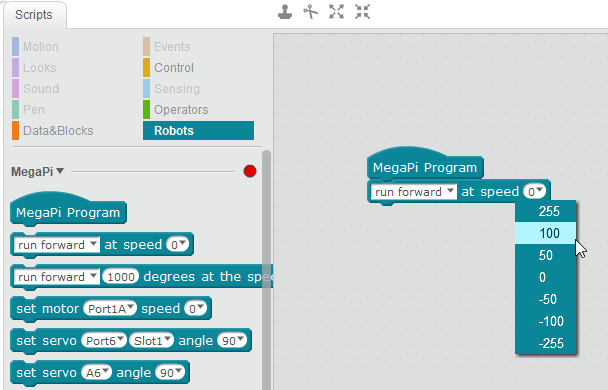
Iz iste kategorije odaberite naredbu run forward at speed 0 i postavite ju ispod MegaPi Program. Kad je speed postavljen na nulu, robot će stajati na mjestu. Klikom na strelicu uz nulu otvara se padajući izbornik iz kojeg možete odabrati brzinu kojom želite da se robot kreće ili klikom samo na nulu ručno upišite brzinu. U ovom slučaju odabrat ćemo brzinu 100.
Iz Control kategorije odaberite naredbu wait 1 secs.
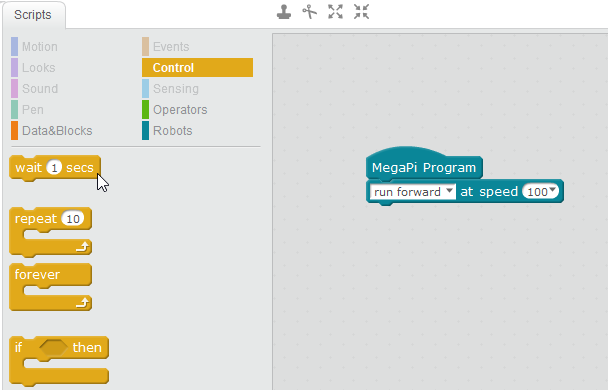
Naredbu wait 1 secs postavite u nastavku bloka i promijenite 1 u 5. Time ste u programu zadali da se robot kreće naprijed brzinom 100 u trajanju od 5 sekundi.
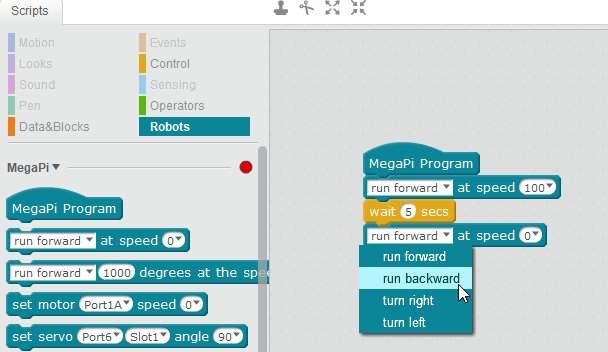
Ponovno iz kategorije Robots odaberite naredbu run forward at speed 0 te iz padajućeg izbornika odaberite opciju run backward te postavite brzinu na 100 kao i za kretanje unaprijed.
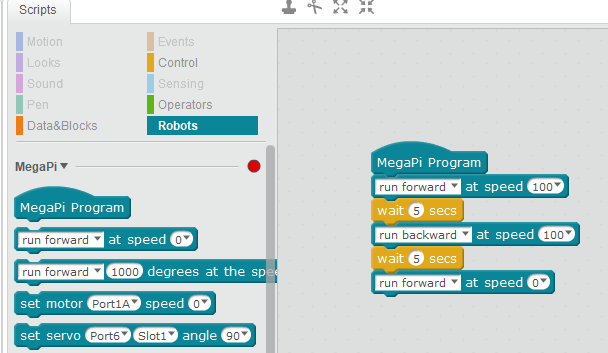
Dodajte naredbu wait i postavite ju na 5 sekundi te za kraj, kako bi robot stao dodajte naredbu run forward at speed 0.
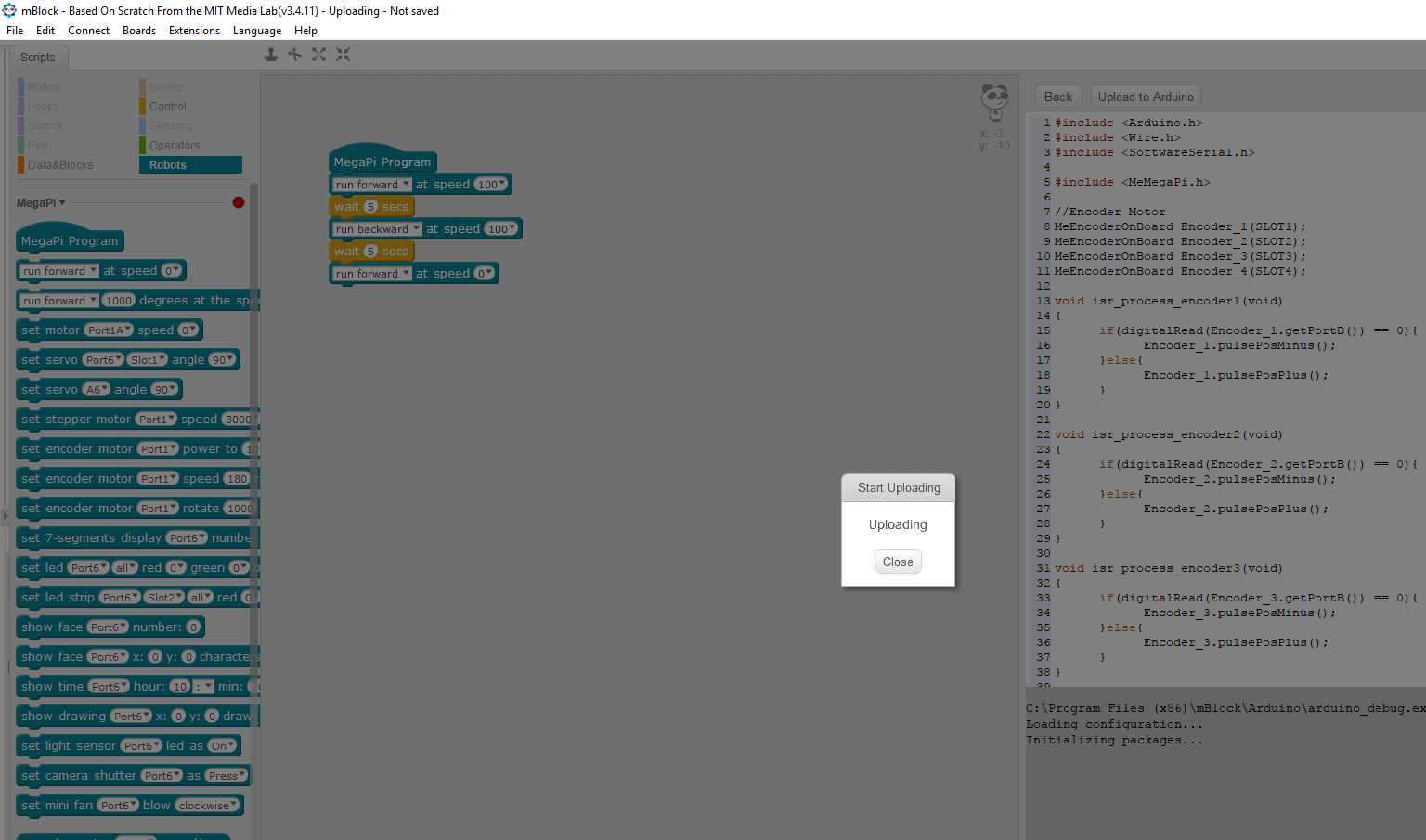
Kako bi napisani program prebacili na robota, u desnom dijelu kliknite na Upload to Arduino.
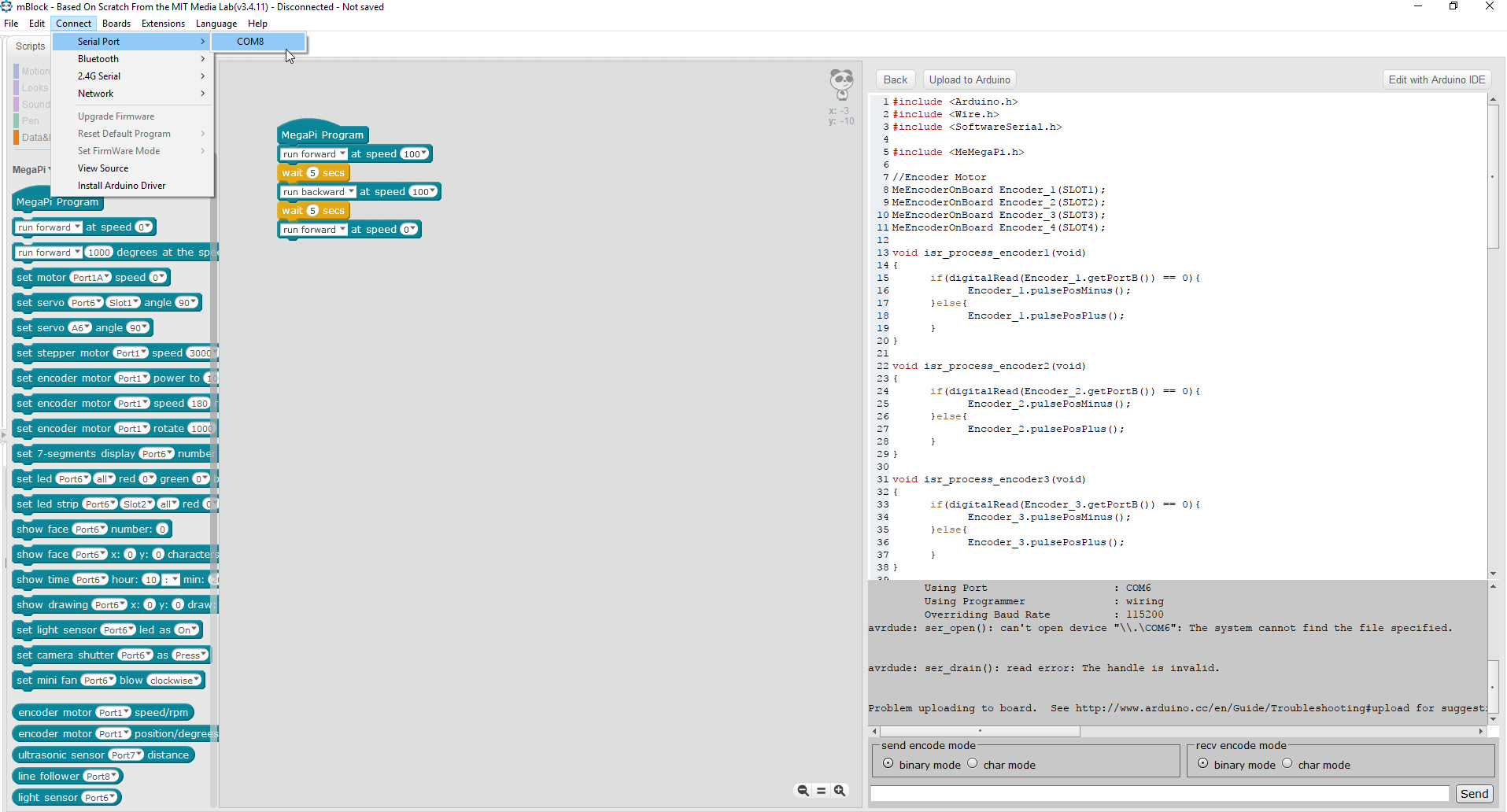
To će potrajati nekoliko sekundi.
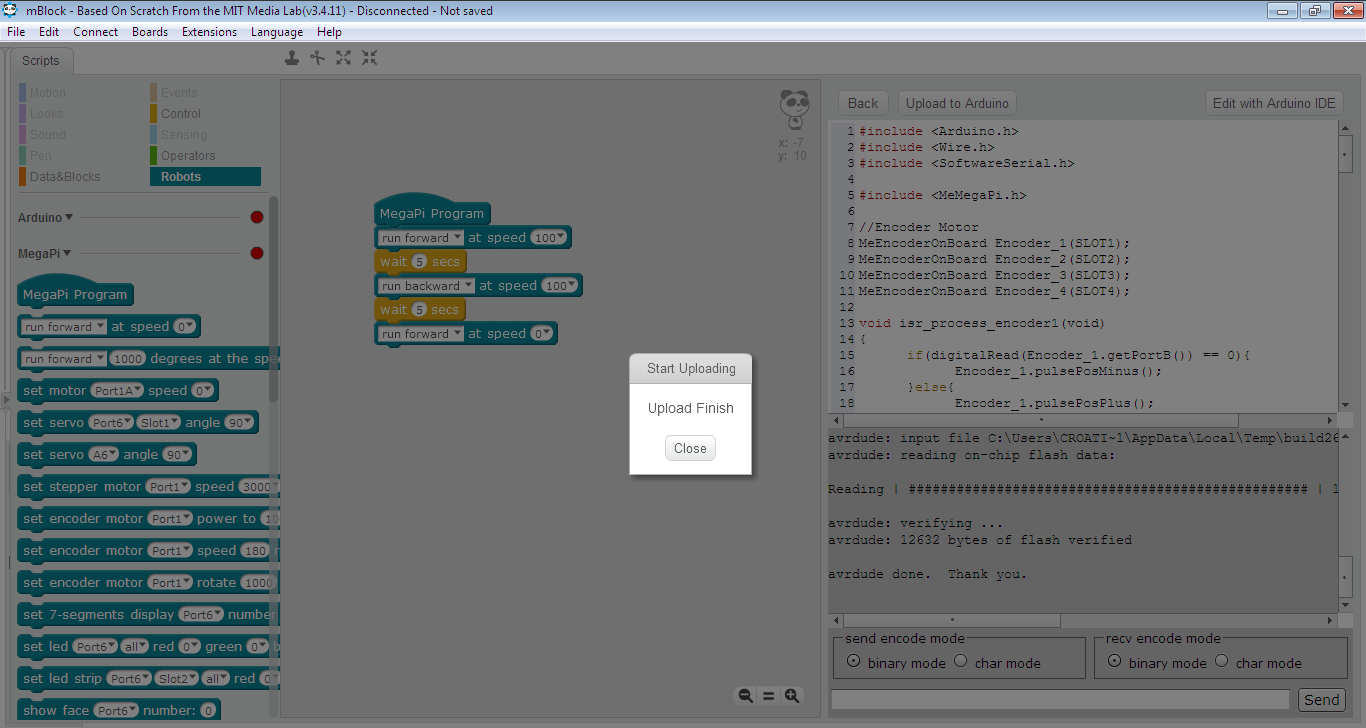
Kad se program prenese, stisnite Close, odvojite kabel od robota, uključite ga i pratite kako se kreće 🙂