16 srp Naredbe za programiranje micro:Maqueen Lite robota
Za programiranje micro:Maqueen robota potrebno je u MakeCode Editor dodati ekstenzije s naredbama za njegovo kretanje, praćenje linije, detektiranje prepreka, uključivanje i isključivanje svjetlećih dioda i drugo.
Pratite izdvojene korake i dodajte potrebne ekstenzije.
1. korak
Najprije pokrenite MakeCode Editor.
Nakon što otvorite novi projekt u MakeCode Editoru, u dijelu s kategorijama naredbi odaberite Advanced.
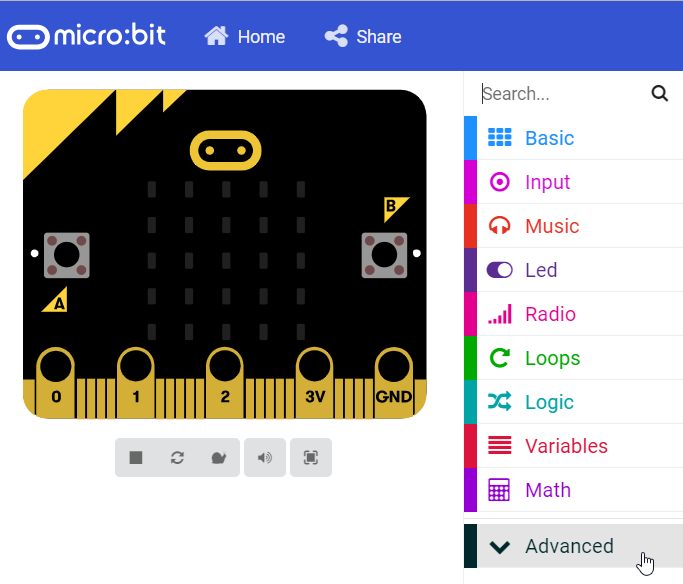
2. korak
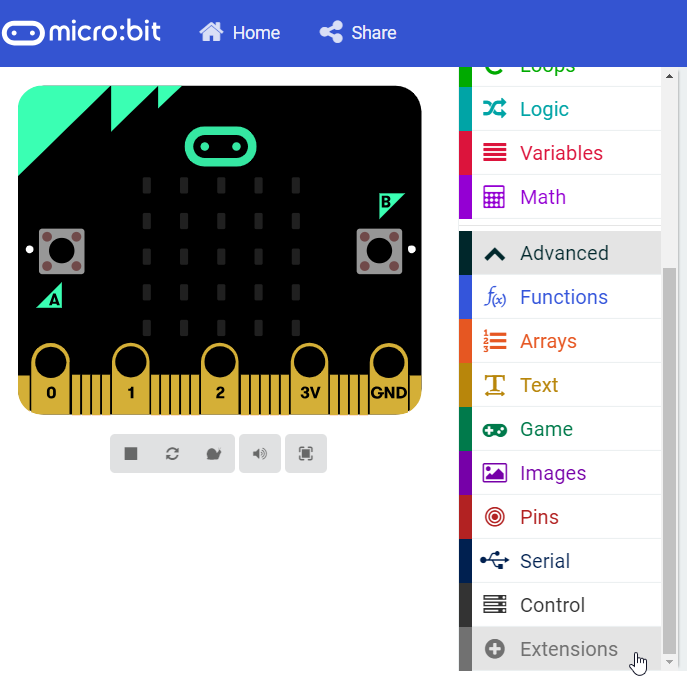
Pritiskom na Advanced otvara se popis s dodatnim kategorijama. Na kraju tog popisa nalazi se opcija Extensions. Pritisnite na nju.
3. korak
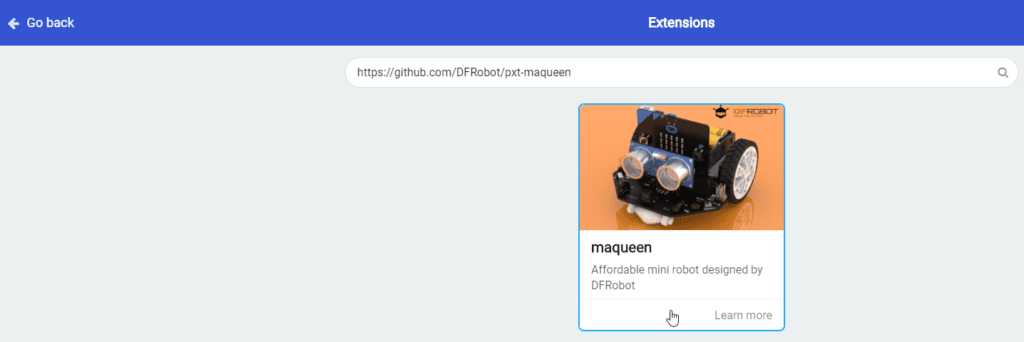
Pritiskom na Extensions otvara se prozor preko kojeg možete pronaći potrebnu ekstenziju. U tražilicu unesite ovu poveznicu https://github.com/DFRobot/pxt-maqueen i pritisnite enter.
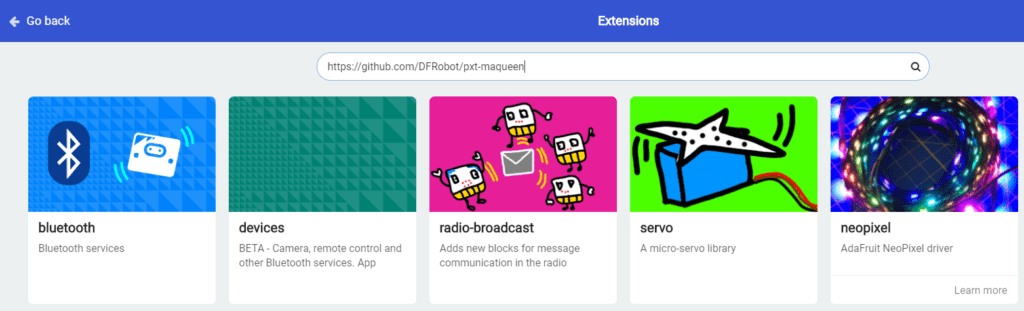
4. korak
U prozoru će se nakon toga pokazati potreba ekstenzija. Odaberite ju.
5. korak
Tim odabirom ćete se vratiti u editor za programiranje te ćete u popisu kategorija pronaći dvije nove kategorije Maqueen i MaqueenIR. U kategoriji Maqueen se nalaze naredbe koje su vam potrebne za programiranje rada robota.
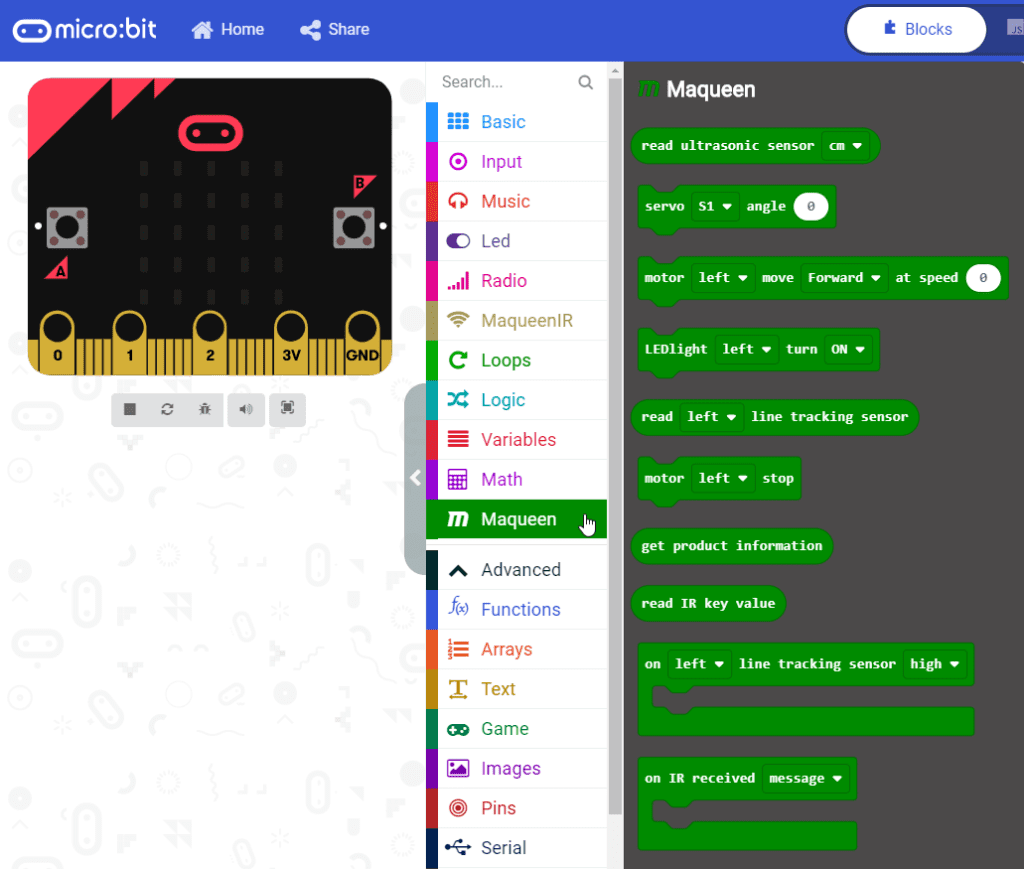
Ovaj izdvojeni popis naredbi za programiranje robota neka ti posluži kao podsjetnik u radu. Ne moraš ga sada detaljno proučavati niti pamtiti. Sve ćeš naučiti u praktičnim primjerima u tečajevima o ovom robotu. Ako ti bude potrebno, moći ćeš se vratiti na ovu lekciju i potražiti objašnjenja naredbi.
Naredba
Objašnjenje
Naredba u programu javlja vrijednost koju očitava ultrazvučni senzor, a to je udaljenost robota od predmeta koji se nalazi ispred njega.
Naredba koja kontrolira rad motora koji pokreću robot.
Prvi argument naredbe označava na koji motor se odnosi – lijevi, desni ili oba.
Drugi argument naredbe se odnosi na smjer kretanja robota.
Treći argument naredbe je brzina kretanja. Vrijednost se kreće od 0 do 255.
Naredba za uključivanje i isključivanje crvenih svjetlećih dioda na prednjoj strani robota.
Prvi argument označava svjetleću diodu (lijevu ili desnu).
Drugi argument je ON/OFF i njime se određuje hoće li označena svjetleća diode biti uključena ili isključena.
Naredba u programu javlja vrijednost koju očitava senzor za praćenje linije. Ako je senzor na crnoj podlozi, ta vrijednost će biti 0, a ako je na bijeloj podlozi bit će 1.
Argument left/right označava na koji senzor se naredba odnosi.

Naredba za zaustavljanje rada motora.
Argument left/right/all označava motor na koji se naredba odnosi.

Naredba koja prati stanje senzora za praćenje linije.
Prvi argument naredbe (left/right) se odnosi na senzor.
Drugi argument naredbe (high/low) se odnosi na stanje senzora. Kad je senzor na bijeloj podlozi, stanje mu je high. Kad je crnoj podlozi, onda je stanje low.
Možete primijetiti da u navedenim naredbama nedostaju one kojima se kontrolira rad RGB svjetlećih dioda. Te se naredbe nalaze u ekstenziji Neopixel koju je potrebno dodati kao i ekstenziju Maqueen.
U nastavku je uputa za dodavanje Neopixel kategorije naredbi.
1. korak
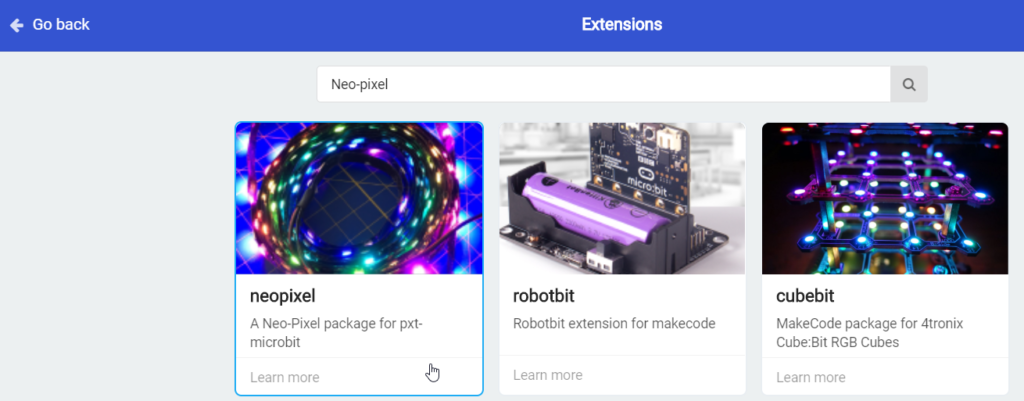
Kliknite na Advanced da dođete do ekstenzija. Pritiskom na Extensions otvara se prozor preko kojeg možete pronaći potrebnu ekstenziju. U tražilicu upišite Neo-pixel i pritisnite enter.
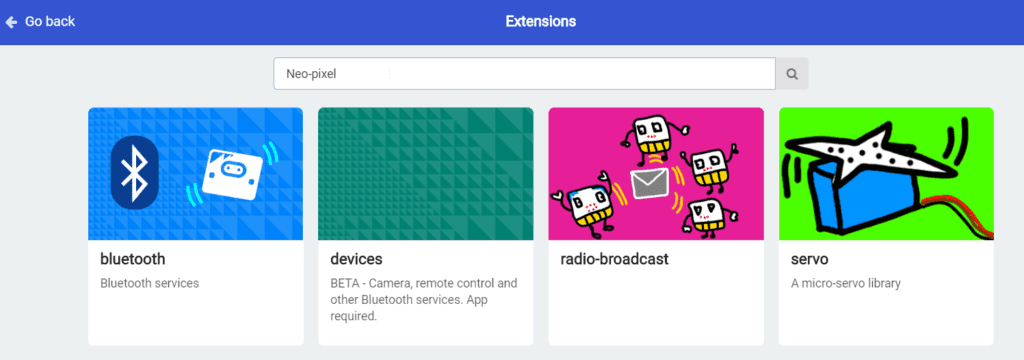
2. korak
U prozoru će se nakon toga pokazati popis ekstenzija koje odgovaraju upisanoj riječi u tražilici. Odaberite prvi ekstenziju kao što je prikazano na slici.
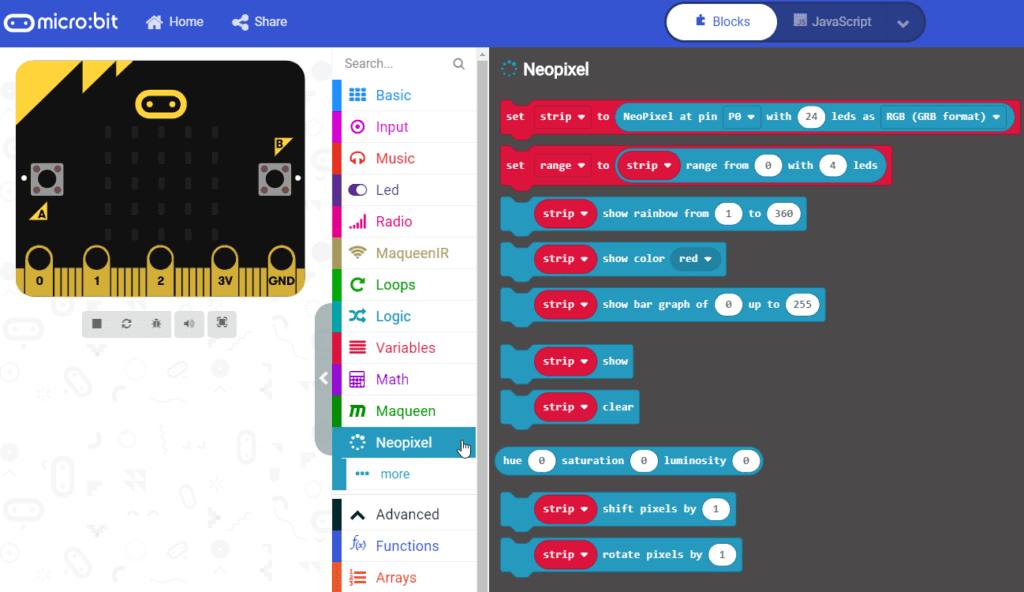
3. korak
Tim odabirom ćete se vratiti u editor za programiranje te ćete u popisu kategorija pronaći dodanu kategoriju Neopixel. U toj kategoriji nalaze se naredbe za programiranje RGB svjetlećih dioda robota. Detaljnije o tome ćeš naučiti u tečaju Komponente micro:Maqueen robota.