25 svi Praćenje crte iznutra
Zadatak
Izradite program kojim će robot samostalno pratiti crnu crtu tako da se ravno kreće po njoj kada su mu oba senzora za praćenje linije na crnoj podlozi.
U slučaju da s oba senzora izađe na bijelu površinu neka vožnjom unatrag ponovno pronađe crnu crtu.
Rješenje
Objašnjenje
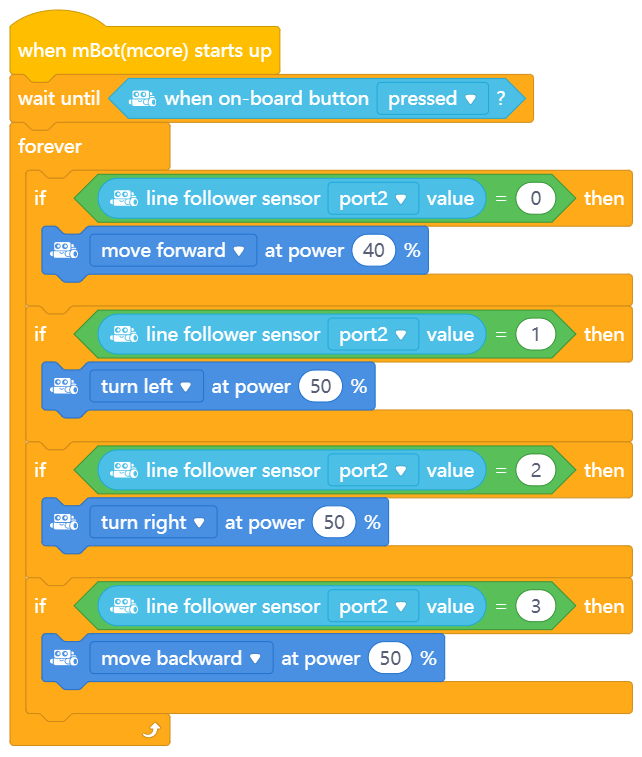
Robot kreće s vožnjom nakon pritiska na tipkalo.
Zatim slijede 4 if then bloka koji provjeravaju 4 moguća očitanja senzora za praćenje linije te ovisno o njima određuju smjer kretanja robota.
Ako su oba senzora za praćenje linije na tamnoj podlozi, senzor očitava vrijednost 0 (if line follower sensor port2 value = 0) i robot se kreće ravno (move forward at power 50%).
U slučaju lijevog zavoja (kad je prvim senzorom robot na tamnoj, a drugim na svijetloj podlozi), senzor očitava vrijednost 1 (if line follower sensor port2 value = 1) te robot mora skrenuti lijevo (move left at power 50%).
Kad robot naiđe na desni zavoj (prvi senzor detektira svijetlu površinu, a drugi je na tamnoj) senzor očitava vrijednost 2 (if line follower sensor port2 value = 2). U tom slučaju robot mora skrenuti desno (move right at power 50%).
U slučaju da su oba senzora izvan linije, senzor očitava vrijednost 3 (if line follower sensor port2 value = 3), robot vozi unatrag ( move backward at power 50%).