07 lip Praćenje linije do prepreke
Za rješavanje ovog zadatka upotrijebite stazu koju ste dobili u kompletu s robotom ili izradite svoju stazu. Svoju stazu možete kreirati od modularnih dijelova koje možete preuzeti ovdje. Isprintajte dijelove staze u količinama koje vam trebaju na papiru veličine A4 te ih spojite po želji. Stazu možete načiniti i na svjetlijoj kartonskoj podlozi ili podu na koji ćete zalijepiti crnu izolir traku ili crni kolaž papir.
Zadatak
Nadogradite primjer iz prošle lekcije tako da robot prati liniju s unutarnje strane sve dok ne naiđe na prepreku na udaljenosti manjoj od 10 cm. Kad detektira prepreku, neka se zaustavi.
Rješenje
Objašnjenje
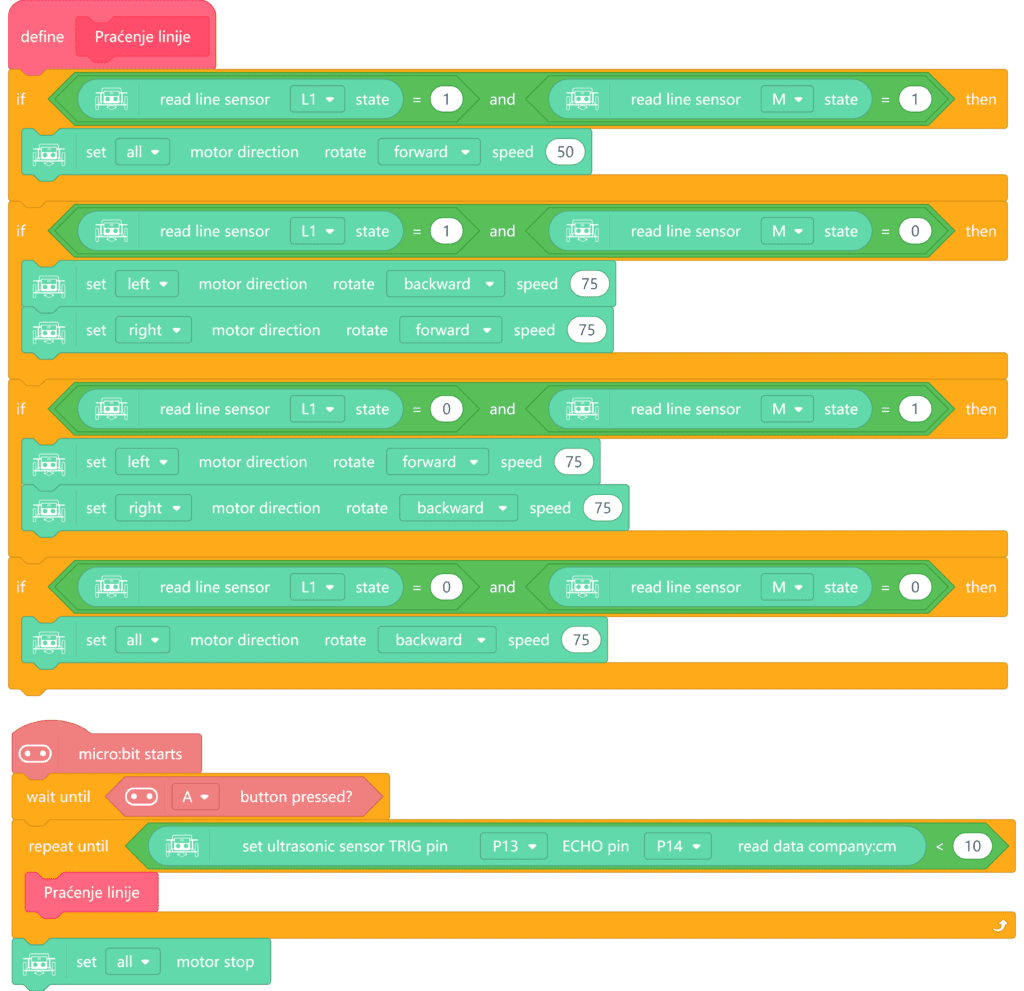
Kako bi program bio pregledniji, kreirajte novi blok opcijom Make a Block unutar My Blocks kategorije. Unutar njega stavite if uvjete za praćenje linije iz prethodnog primjera.
U glavnom dijelu programa micro:bit starts ostavite naredbu wait until A button pressed? kako bi robot krenuo s praćenjem linije tek nakon pritiska na tipkalo. Nakon nje, stavite naredbu repeat until iz Control kategorije. Želite da robot prati liniju sve dok ultrazvučnim senzorom ne detektira prepreku na udaljenosti manjoj od 10 cm. Zato kao uvjet repeat until bloka stavite naredbu usporedbe, manje od (<) te u lijevo polje smjestite naredbu set ultrasonic sensor TRIG P13 ECHO pin P14 read data company:cm, a u desno upišite broj 10.
Sve dok ultrazvučni senzor ne detektira prepreku, robot prati liniju naredbom Praćenje linije koja se odnosi na blok koji ste prethodno izradili. Naredbu možete pronaći u dijelu My Blocks.
Kada robot detektira prepreku, program izlazi iz bloka repeat until i izvršava se naredba set all motor stop i robot se zaustavlja.