
17 tra Obilazak oko stolice uz pomoć ultrazvučnog senzora
Zadatak
Izradite program kojim će se robot zaobići cijelu stolicu oko koje se nalaze prepreke. Robot će ih prepoznati uz pomoć ultrazvučnog senzora. Kad naiđe na prepreku, neka skrene lijevo i nastavi do sljedeće prepreke.
Rješenje
Objašnjenje
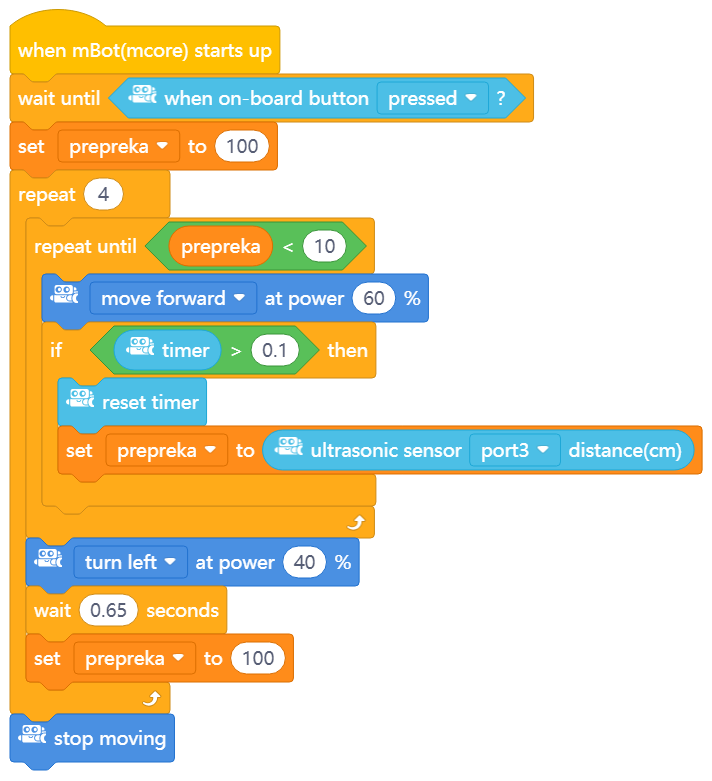
Program kreće pritiskom na tipkalo (wait until when on-board button pressed), najprije varijabla prepreka ima definiranu vrijednost 100, a nakon toga se 4 puta (repeat 4) robot kreće ravno sve dok ne dođe do prepreke na udaljenosti manjoj od 10 centimetara te tada skreće lijevo. Kad obiđe cijeli put, zaustavlja se.